Weight clamping mechanical gripper for metrological verification work
A technology of metrology verification and manipulator claws, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inability to accurately ensure the quality of verification work, damage to weighing equipment, and rough structures, so as to achieve high verification work efficiency and increase grabbing. The effect of strong adaptability and overload capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
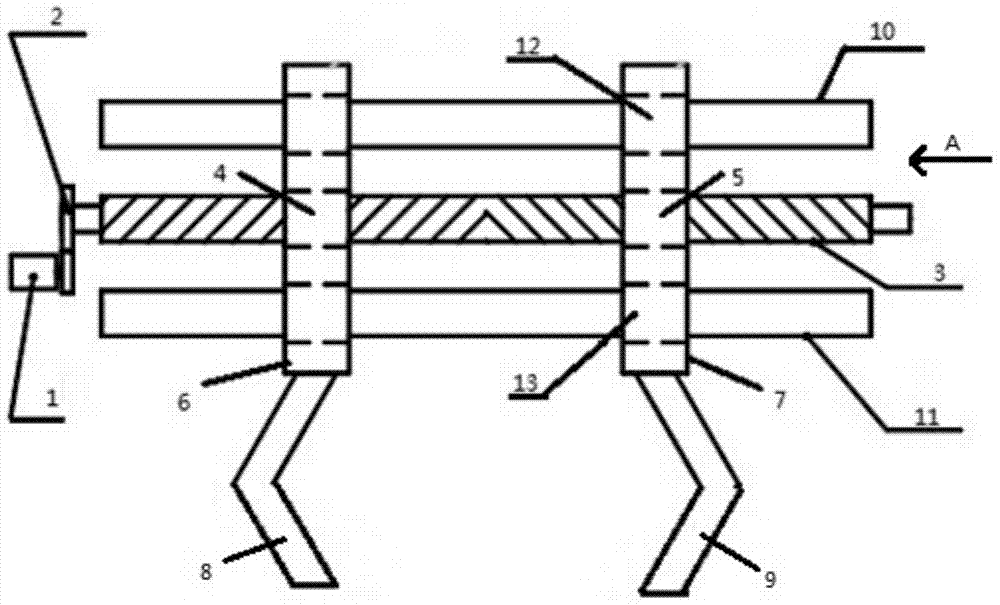
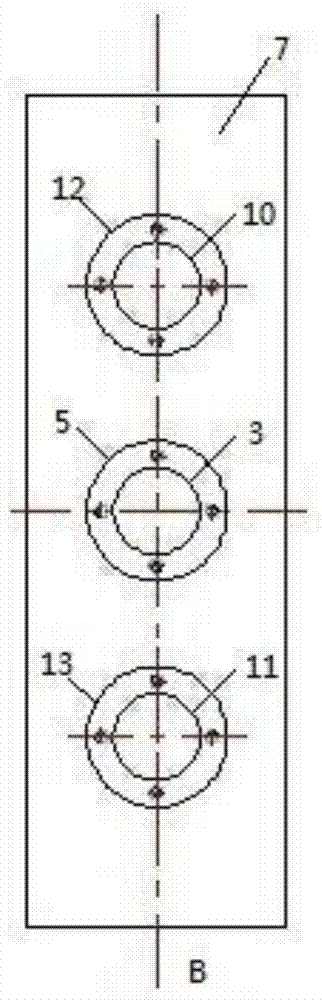
[0035] Such as figure 1 and figure 2 As shown, a weight clamping manipulator used for metrological verification work includes an AC servo motor 1, a reduction gear 2, a double-rotation screw 3, a first screw nut 4, a second screw nut 5, a second screw nut A connecting platen 6, a second connecting platen 7, a first clamp 8, a second clamp 9, a first linear guide rail 10, a second linear guide rail 11, a first linear bearing 12 and a second linear bearing 13; The AC servo motor 1 is connected to the reduction gear 2, and the reduction gear 2 is connected to the double-rotation screw 3 through a key; a part of the double-rotation screw 3 is connected to the first screw nut 4, and the other part is connected to the second screw nut 4. Lead screw nut 5 converts rotary moti...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com