Variable-viewing angle obstacle detection method for robot based on outline recognition
A technology for obstacle detection and robotics, which is applied in the fields of computer vision and image measurement, can solve problems such as poor speed, reduced calculation amount, and large amount of calculation, and achieve high real-time performance, reduced calculation amount, and small amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] specific implementation plan
[0042] Below with reference to accompanying drawing, specific embodiment of the present invention is described in more detail.
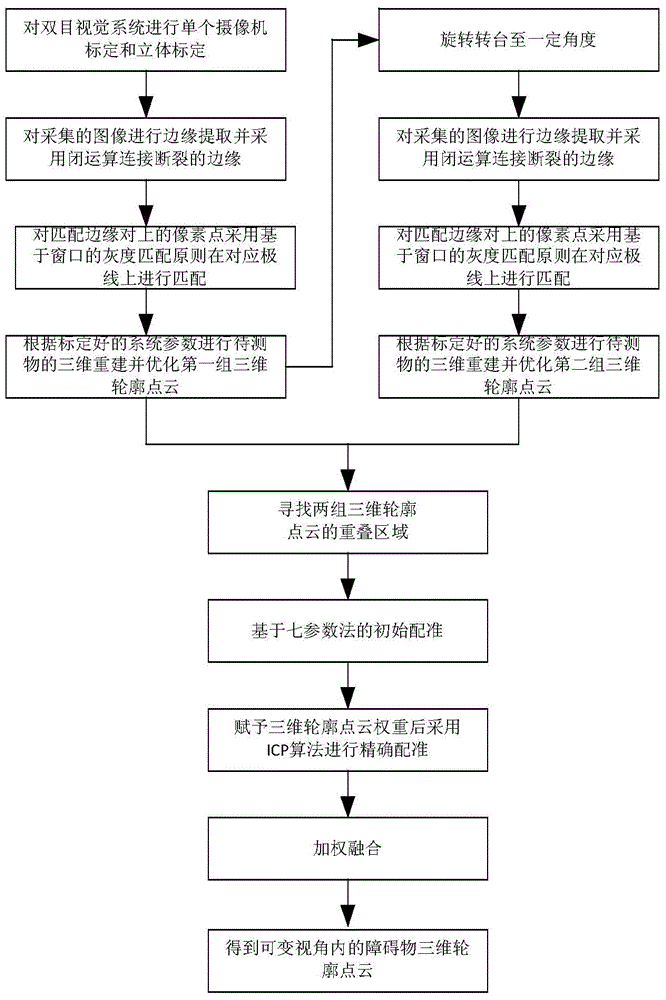
[0043] figure 1 It is a flow chart of the entire three-dimensional reconstruction and splicing of the present invention, a method for detecting obstacles based on contour recognition with a variable viewing angle of a robot, comprising the following steps:
[0044] (1) Calibration of the binocular vision system. The calibration of the camera is to obtain the internal and external parameters of the camera. Even the internal and external parameters of the same type of camera are different, so it is necessary to calibrate the two cameras used in the experiment to obtain their internal and external parameters. First, the CCD camera is installed on the turntable of the robot, and a single camera is calibrated to obtain the internal and external parameters of each camera, and then the binocular vision system is calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com