Graph-based vision SLAM (simultaneous localization and mapping) method
A technology of visual and visual words, applied in directions such as road network navigators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
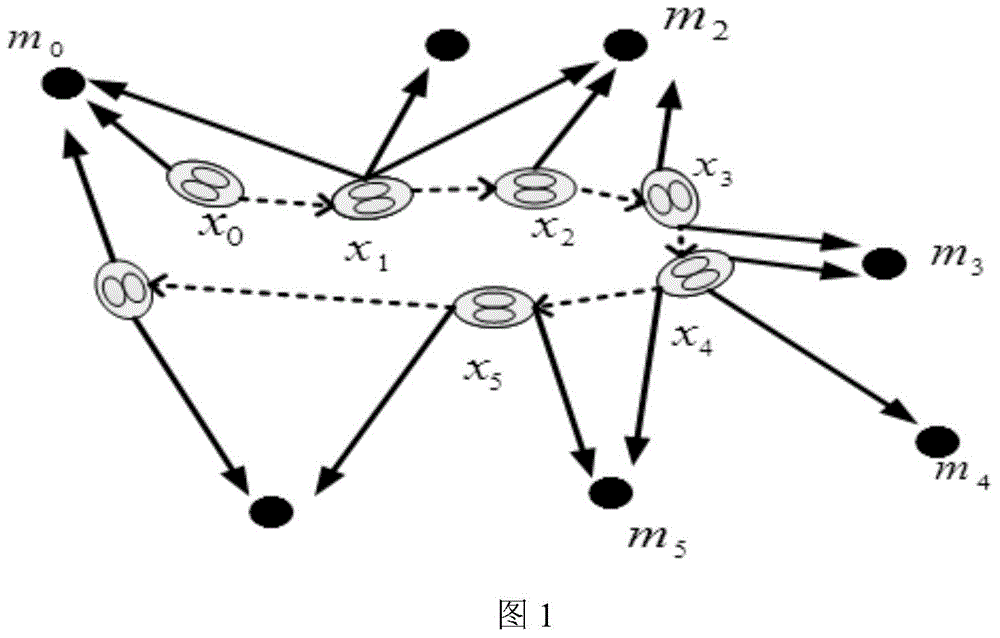
[0054] Graph-based SLAM method, Grisetti proposed that the graph-based SLAM method is divided into two parts: graph construction and graph optimization. The construction of the graph is established through data association, that is, the constraint relationship between graph nodes. Data association includes local data association and global data association. Local data association refers to the matching between consecutive image frames to solve the problem of relative pose estimation. Global data association Obtained by closed-loop detection. Graph-based SLAM can be understood as a sparse graph of nodes and constraints between nodes. The node of the graph is the position x of the robot 0 , x 1 ,...,x T n features m in the map 0 , m 1 ,...,m n-1 . Constraints are successive robot poses x i , x i-1 and the relative positions between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com