Specialized sport controller hardware platform used for 6-degree-of-freedom parallel robot
A motion controller and hardware platform technology, applied in the direction of program control manipulators, manipulators, electrical components, etc., can solve the problems of high price, control algorithm cannot be modified by users, weak openness, etc., to ensure control accuracy and good consistency scalability and scalability, the effect of reducing overhead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings. It should be noted that this embodiment is based on the technical solution and provides detailed implementation and operation process, but the protection scope of the present invention is not limited to this embodiment.
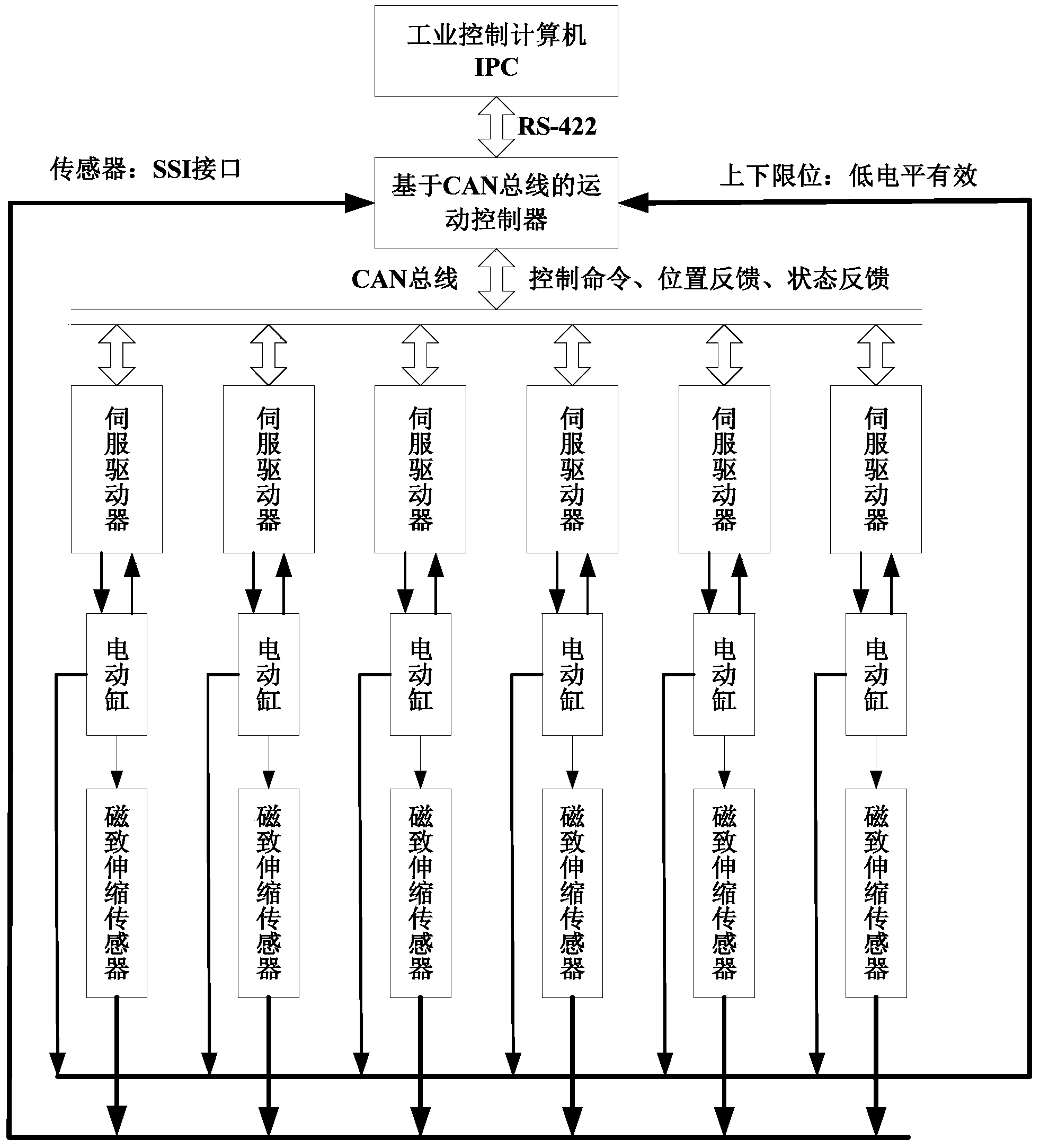
[0048] Such as figure 1 As shown, a special motion controller hardware platform for a 6-DOF parallel robot (hereinafter referred to as a special motion controller) is located in a control system that adopts the control form of "host computer + special motion controller". The industrial control computer IPC is used as the upper computer to realize the control interface function, and through the upper computer communication module, the RS422 asynchronous serial communication method is used to issue control commands to the special motion controller, and the special motion controller analyzes the commands; then, according to the current The system status an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com