Robot task commander with extensible programming environment
A robot and editor technology, applied in the field of robot task directors with an extensible programming environment, can solve problems such as low programming efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
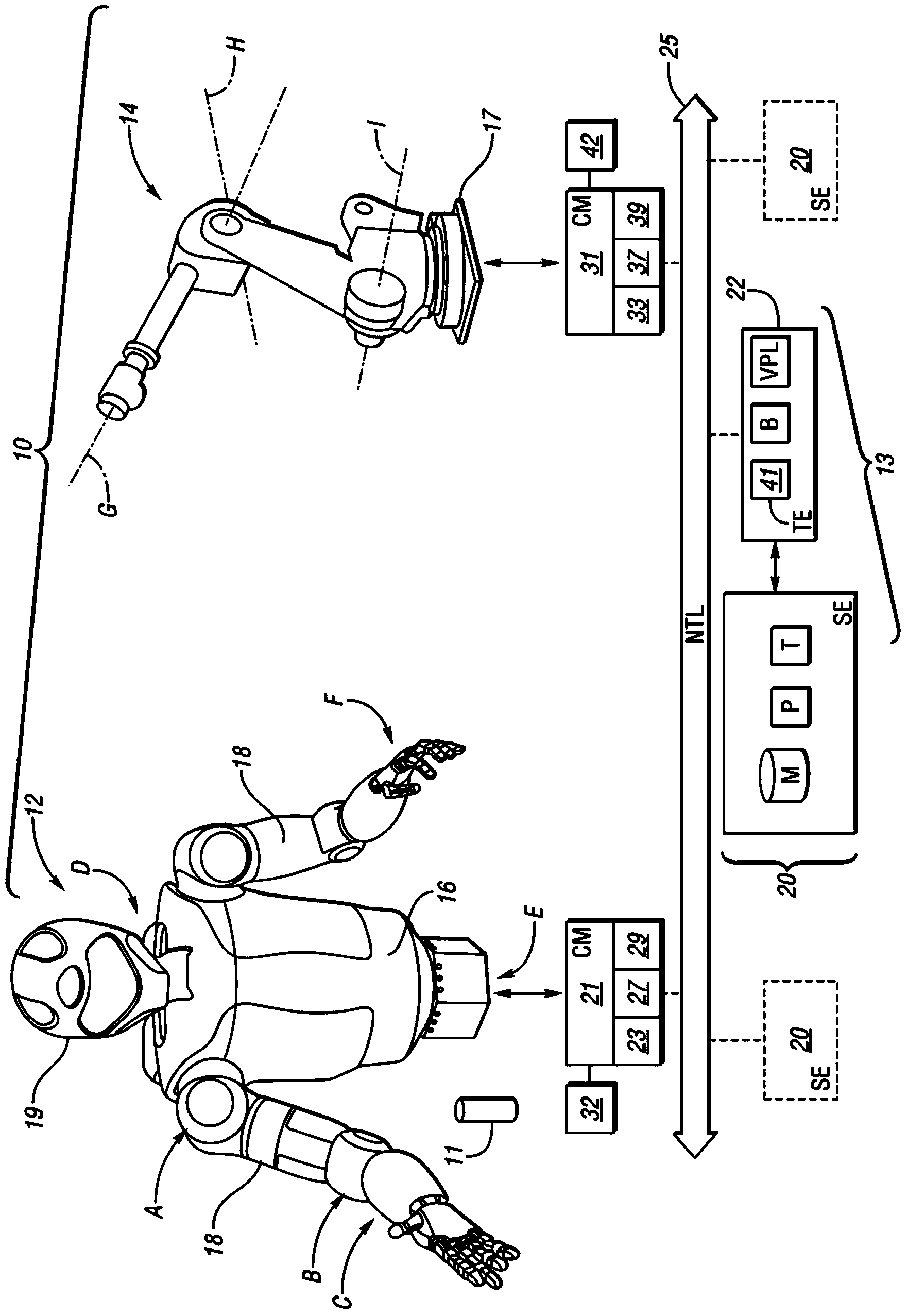
[0020] Referring to the drawings, wherein like numerals designate the same or similar parts throughout the several views, figure 1 A distributed robot control network 10 is shown schematically. For example, the control network 10 may include the example humanoid robot 12 as shown and a conventional multi-axis robot 14 , and / or more or fewer robots of greater or lesser complexity relative to the robots 12 , 14 . As set forth herein, integrated robotic mission planning for one or more robots is implemented within the control network 10 via a robotic mission director (RTC) 13 .
[0021] Typically, mission planning in a distributed control environment is performed at the level of each robot 12 , 14 , specifically only for those particular robots 12 , 14 . When constructed and used as described herein, RTC 13 instead provides a graphical integrated development environment (IDE) that allows new program code to be written using the visual programming language (VPL). This takes plac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com