Robot walking leg mechanism with integration of wheel type, foot type and wheel-foot composite type
A composite and robotic technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems that cannot be applied to legged robots and ground vehicles, etc., to improve the stability of the body, reduce the difficulty of control, and increase the wheel-ground contact area Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
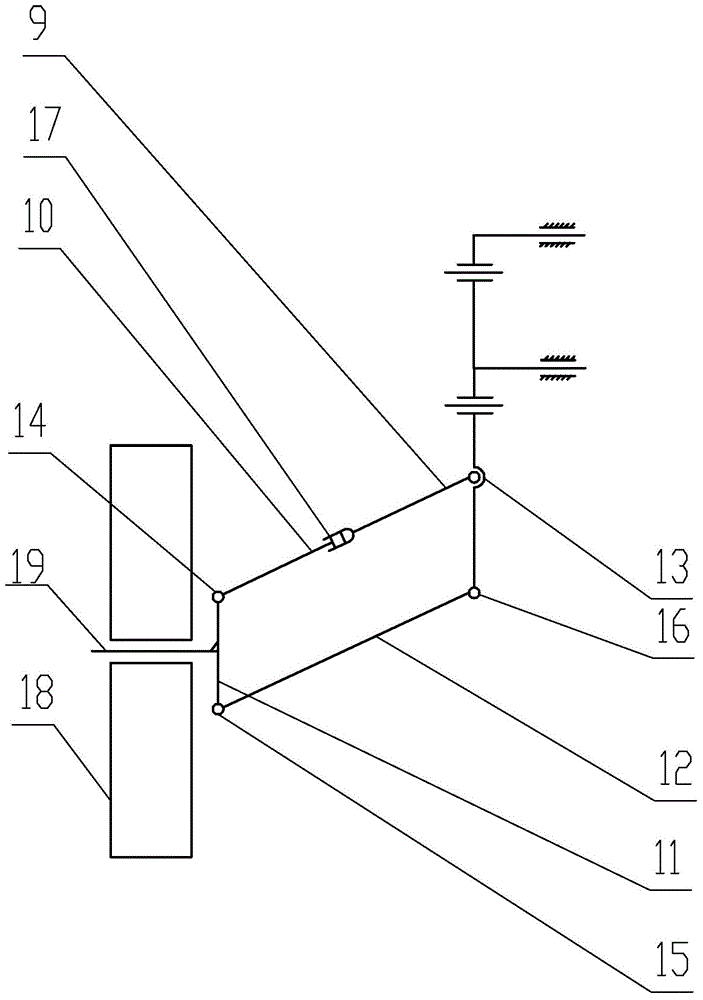
[0016] Embodiment 1: Combining Figure 1-Figure 2 Describing this embodiment, the walking leg mechanism of the robot that integrates wheeled, footed and wheeled-foot composite walking in this embodiment includes a front swing rod assembly, a side swing rod assembly, a wheel shaft 8, a wheel 18 and a connecting rod 2, which are connected to The rod 2 is arranged vertically, the front sway rod assembly is installed on the upper part of the connecting rod 2, one end of the side sway rod assembly is installed on the lower part of the connecting rod 2, and the side sway rod assembly is perpendicular to the front sway rod assembly, and the wheel axle 8 is connected to the side. The other end of the swing rod assembly is connected, and the wheel 18 is rotatably sleeved on the wheel axle 8,
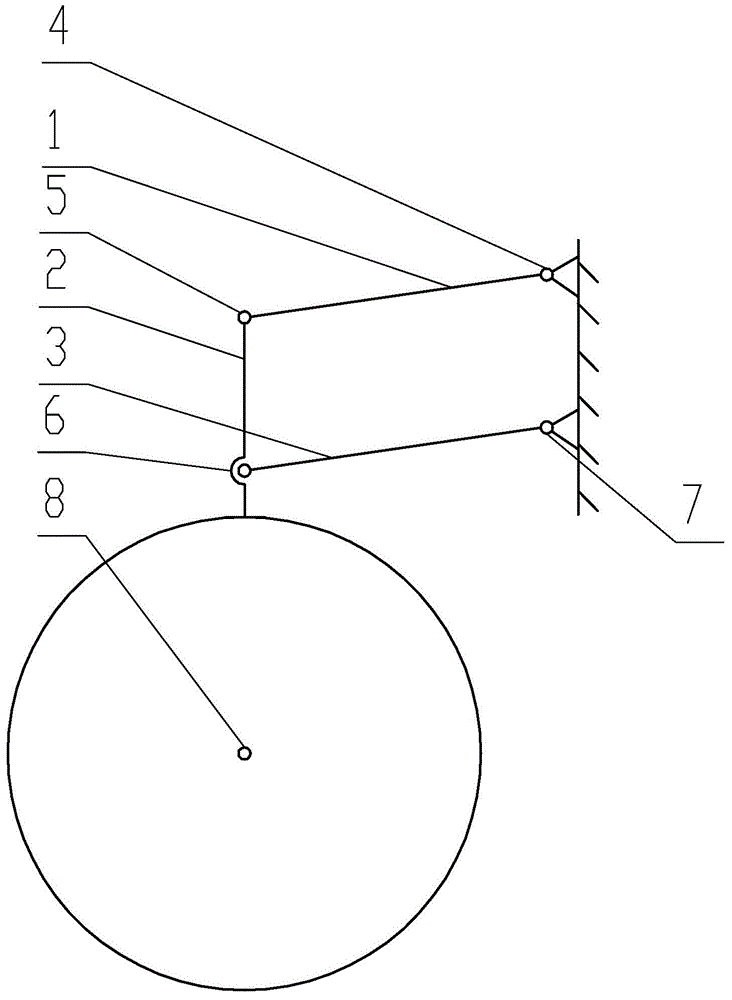
[0017] The front swing rod assembly includes a front swing first link 1 , a front swing third link 3 , a front swing first hinge 4 , a front swing second hinge 5 , a front swing third hinge 6 and...
specific Embodiment approach 2
[0019] Specific implementation mode 2: Combining Figure 1-Figure 2 Describing this embodiment, the lengths of the first front swing link 1 and the front swing third link 3 in this embodiment are equal, the front swing first hinge 4 , the front swing second hinge 5 , the front swing third hinge 6 and the front swing The axes of the fourth pendulum hinge 7 are parallel to each other, the front pendulum first link 1, the upper part of the connecting rod 2, the front pendulum third link 3, the vehicle body, the front pendulum first hinge 4, the front pendulum second hinge 5, the front pendulum The third hinge 6 of the pendulum and the fourth hinge 7 of the front swing constitute a parallel four-bar mechanism. This arrangement is convenient to realize the active swing in the front-rear direction of the present invention by driving the first front-swing hinge 4 or the fourth front-swing hinge 7 by the motor or hydraulic pressure on the robot. Other components and connection relati...
specific Embodiment approach 3
[0020] Specific implementation three: combination Figure 1-Figure 2 Describing the present embodiment, the distance between the side swing first hinge 13 and the side swing fourth hinge 16 in this embodiment is equal to the distance between the side swing second hinge 14 and the side swing third hinge 15 . The axes of the hinge 13, the second hinge 14 for the side swing, the third hinge 15 for the side swing and the fourth hinge 16 for the side swing are parallel to each other and perpendicular to the axis of the first hinge 4 for the front swing. Link 9, side swing second link 10, side swing third link 11, side swing fourth link 12, side swing first hinge 13, side swing second hinge 14, side swing third hinge 15 and side The fourth hinge 16 of the pendulum constitutes a planar four-bar mechanism. This arrangement facilitates the implementation of the lateral active swing of the present invention by driving the first side swing hinge 13 or the side swing fourth hinge 16 by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com