Soft landing obstacle avoidance simulation test system
A simulation test system and obstacle avoidance technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problem of not being able to fully test the real working performance of landing navigation sensor measurement and imaging, difficult to achieve soft landing hovering, Problems such as obstacle avoidance and slow descent, transmission timing and delay control scheme cannot be verified, etc., to achieve high-precision and high-dynamic landing process simulation, simple and clear test process, and prominent verification effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
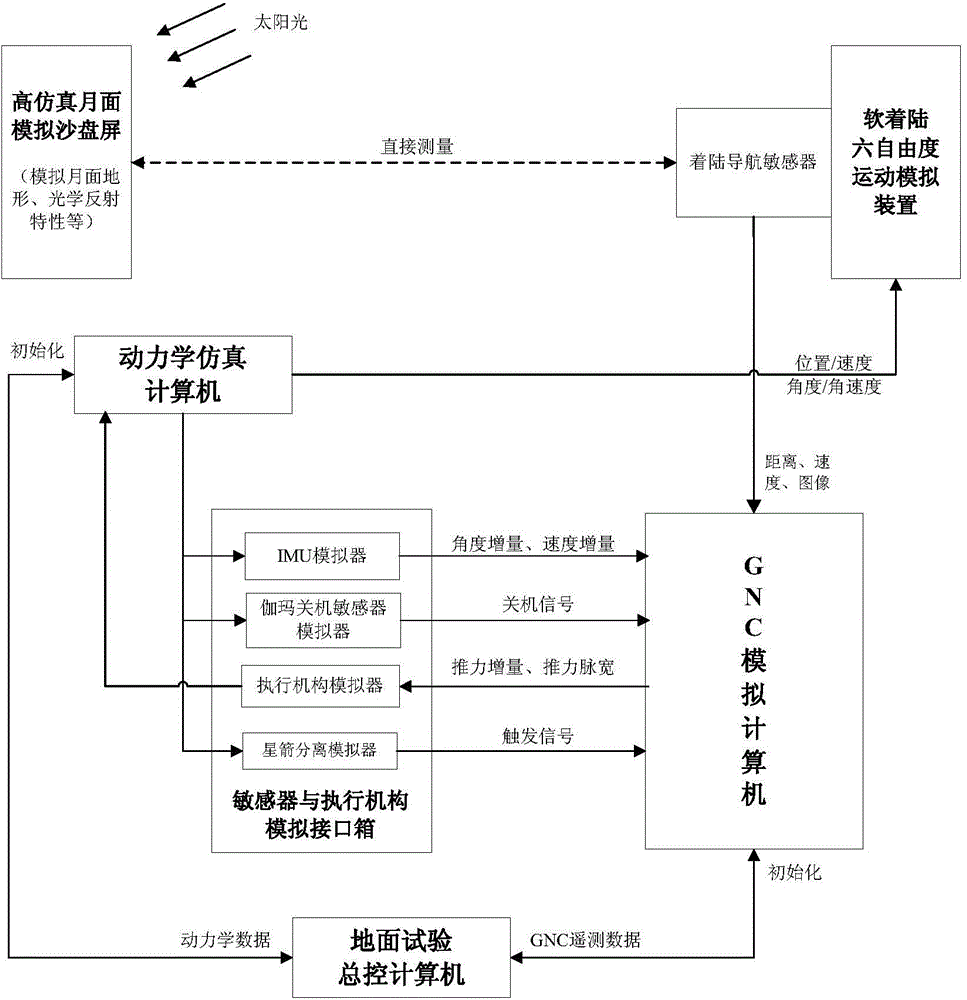
[0022]The most critical issue for unmanned soft landing on the moon or deep-space objects is to ensure the safe landing of the probe. Since humans know little about the topography of extraterrestrial bodies such as the moon, and considering the complexity of the terrain, it is necessary for the probe to have a highly autonomous obstacle recognition and avoidance function. This requires the detector to have advanced measurement and obstacle avoidance means. For example, for a soft landing on the moon, it is necessary to configure new measurement equipment such as ranging radar and three-dimensional imaging sensor for the distance, speed and accurate three-dimensional terrain relative to the lunar surface. Measurement of information. It is difficult for these sensors to fully reflect their functional performance only by mathematical simulation, so pure mathematical simulation cannot fully verify the obstacle recognition and obstacle avoidance control of soft landing. However, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com