Active and passive combination of augmented flexible lower extremity exoskeleton
An active-passive, exoskeleton technology, used in medical science, artificial legs, prostheses, etc., can solve the problems of complex driving and high energy consumption, and achieve the effect of reducing the difficulty of computing, reducing energy consumption, and reducing energy loss.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0024] Such as Figure 1-6 shown.
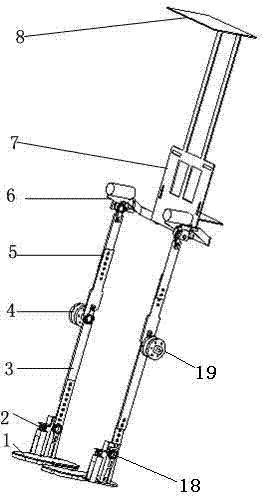
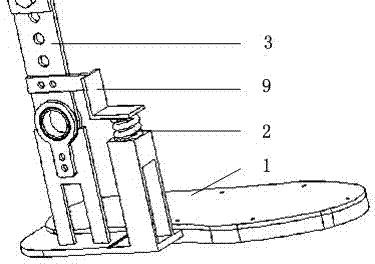
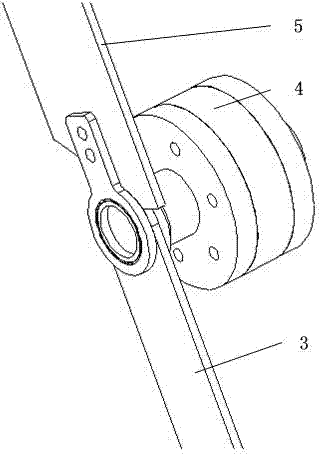
[0025] A flexible lower limb exoskeleton combining active and passive combined strength, which includes foot 1, calf 3, thigh 5 and back frame 7, the length of calf 3 and thigh 5 is adjustable, and the connection between foot 1, calf 3 and thigh 5 and the human body in the same way as existing exoskeletons, such as figure 1 As shown, a solar device 8 for charging the battery on the back is installed on the back frame 1, and the calf 3 is rotatably connected with the foot 1 through the ankle joint 18. The lower end of the calf 3 is connected with an ankle joint pressing plate 9, and the ankle joint pressing plate 9 It counteracts with the ankle joint spring 2 for foot assist, the ankle joint spring 2 is installed in the spring seat 201, and the spring seat 201 is fixedly connected with the foot 1 (plantar plate),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com