Multi-camera coordination control and quick precise target identification device
A technology of coordinated control and target recognition, applied in character and pattern recognition, computer parts, television, etc., can solve the problem of errors in the final positioning result, and achieve the effect of avoiding complex calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
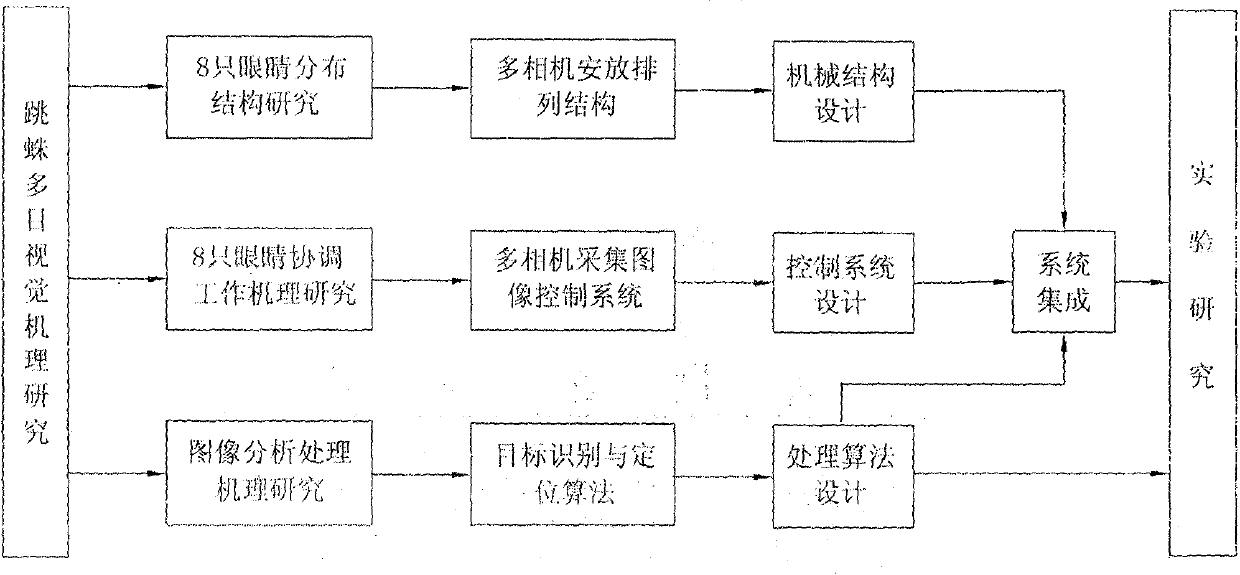
[0028] see figure 1 , the specific implementation method adopts the following technical scheme: it uses eight cameras to realize the 360 ° observation field of view, uses the matching results of the blurred image collected before and after focusing and the clear image and geometric light path analysis to quickly and accurately locate the target, through Image processing recognizes and locates targets without complex coordinate transformation calculations.
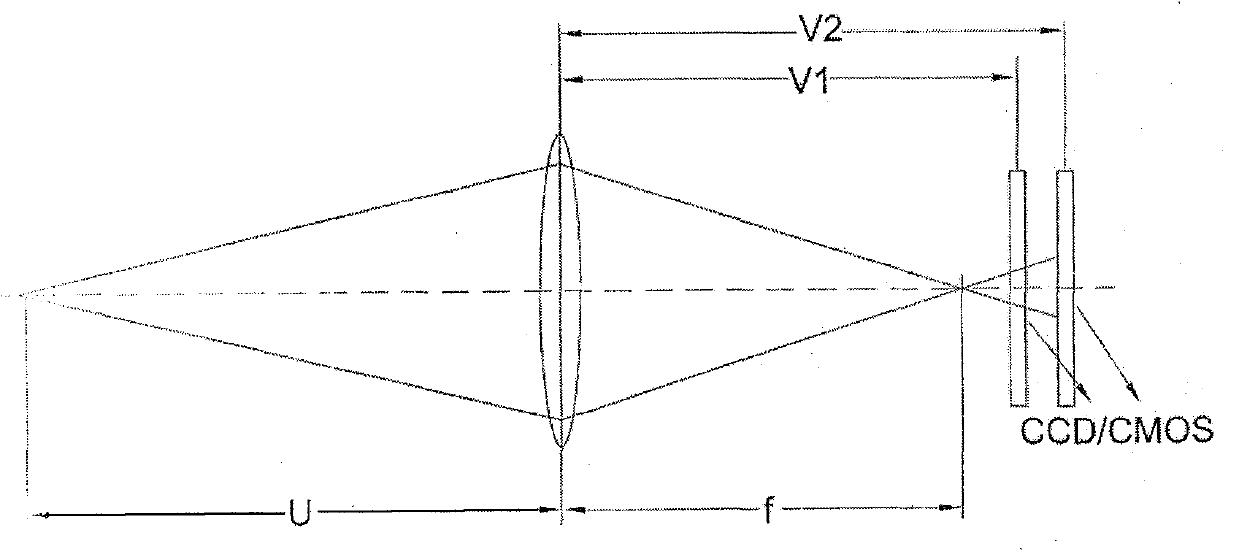
[0029] The eight cameras mentioned above all have an auto-focus function. When the target is recognized, the corresponding camera is triggered to collect two images before and after focusing, and the position of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com