UUV three-dimension sea route planning method in moving obstacle environment
A motion obstacle and route planning technology, applied in three-dimensional position/course control, etc., can solve the problem that the robot cannot reach the target point, and achieve the effect of optimizing the route planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
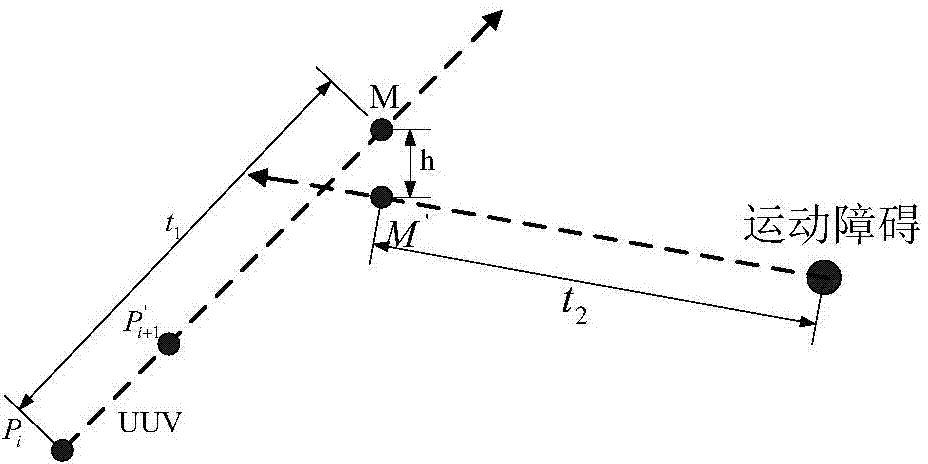
[0034] Step 1: Establish a UUV three-dimensional obstacle avoidance cost function by calculating the time when the UUV encounters a fixed obstacle and a moving obstacle;
[0035] The closer the UUV is to the obstacle in the forward direction, the larger the cost function, and vice versa. The fixed obstacle cost function for collision avoidance is:
[0036] f 1 = n * S L ( ψ , θ ) - - - ( 1 )
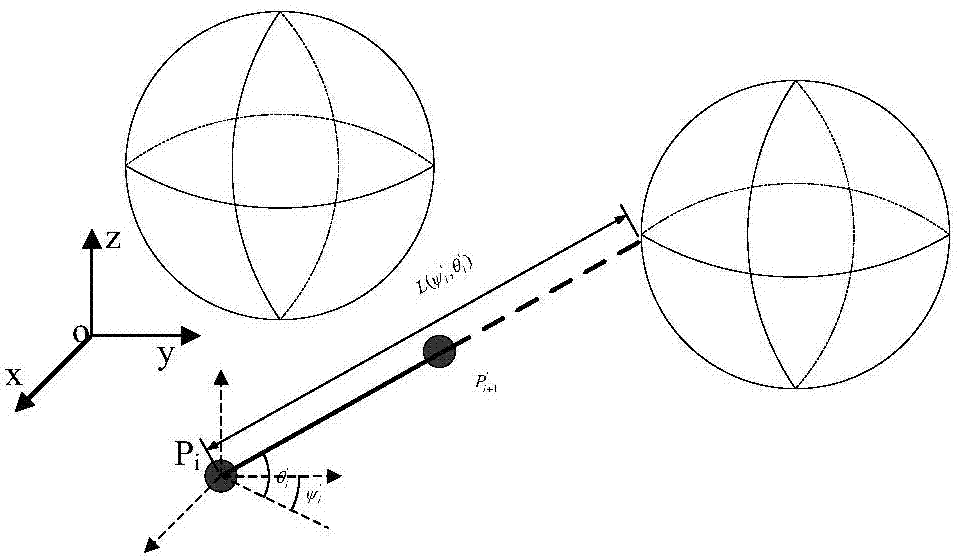
[0037] In the formula, n is a constant coefficient to adjust the sensitivity of obstacle avoidance. S is the planning step, that is, the distance from the current point to the next planned point. L(ψ,θ) is the straight-line distance between the current point a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com