Teaching track planning method and system for robot
A trajectory planning and robot technology, applied in the field of robot research, can solve problems such as complex optimization calculation process, uncontrollable robot trajectory accuracy, difficult polynomial times, etc., to achieve accurate space trajectory planning, smooth teaching action, and forward-looking error control smooth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the purpose, technical solution and advantages of the patent of the present invention clearer, the patent of the present invention will be further described in detail below in conjunction with the accompanying drawings.
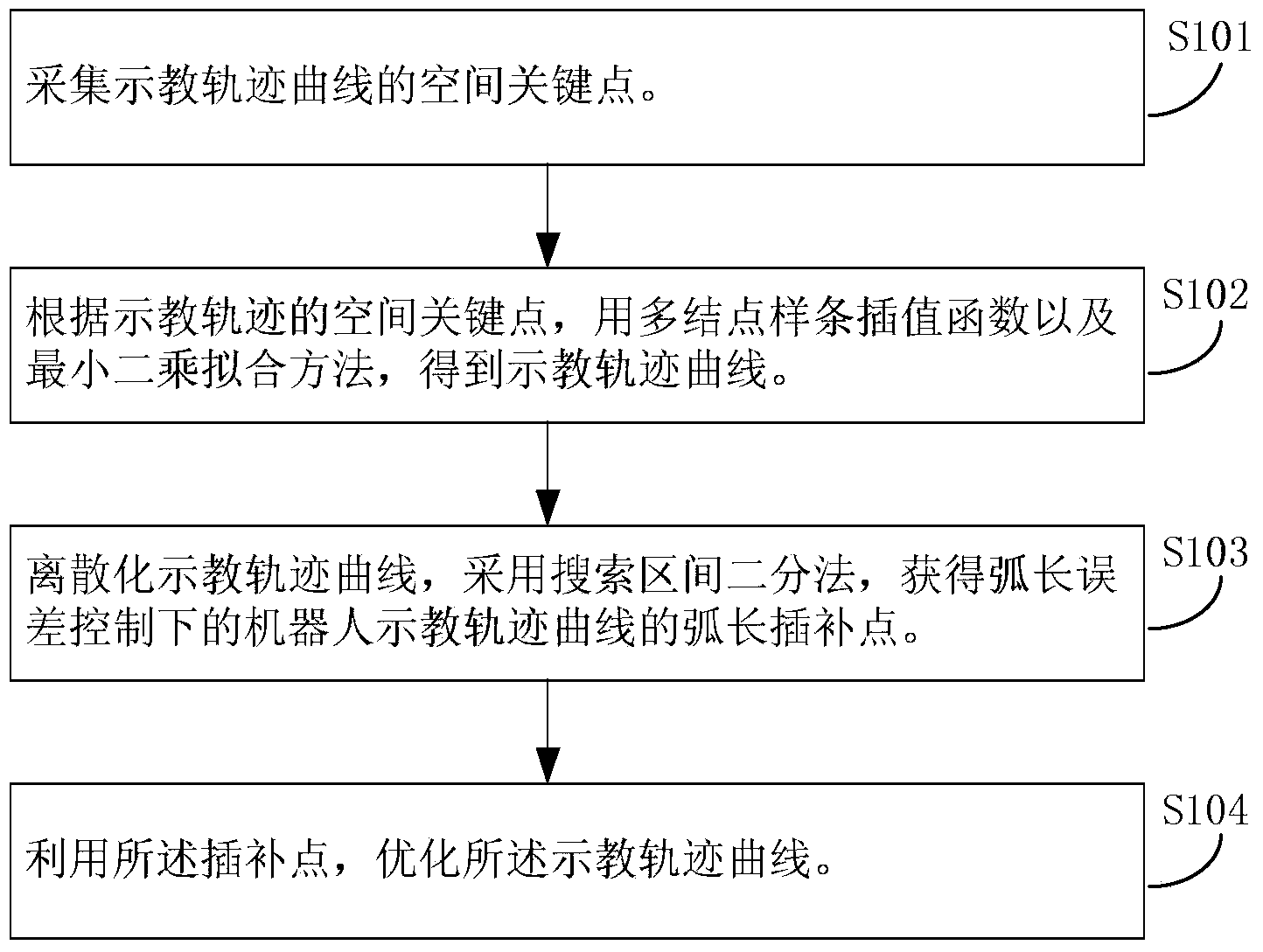
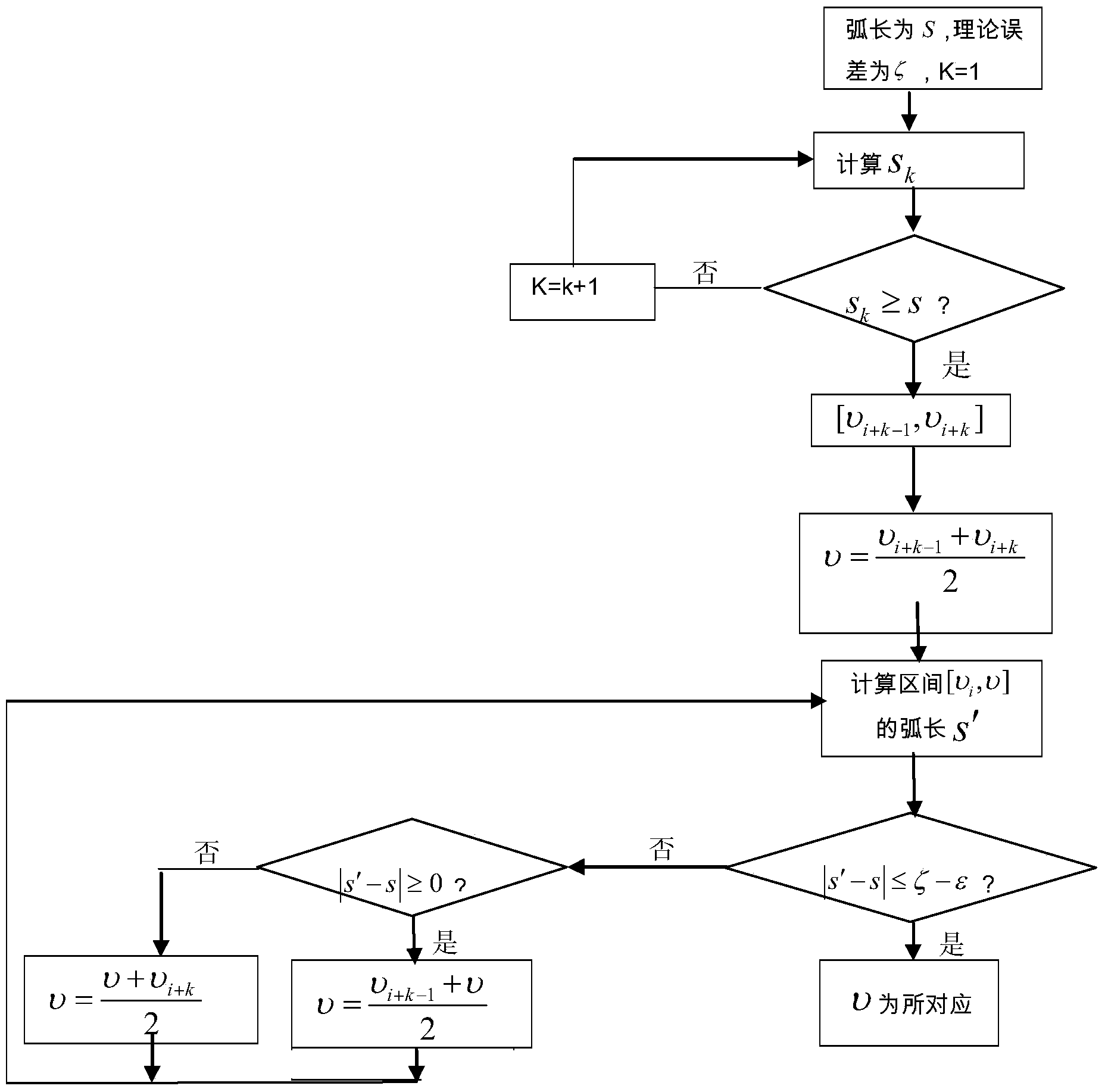
[0030] The invention provides a robot teaching trajectory planning method, which obtains the spatial key point position of the teaching trajectory; according to the spatial key point series of the trajectory, the good locality and explicit invariance of the multi-node spline function are fully utilized. Solving the characteristics of equations, interpolation, and no need to give node tangent information when solving, the order of the interpolation polynomial remains unchanged when the number of nodes increases, etc., to achieve robot space trajectory curve fitting, and to obtain the teaching space trajectory curve; and The space trajectory curve is discretized to obtain the interpolation point of the robot motion trajectory under the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com