Rocker-type double-trapezoid pedrail robot
A crawler robot and rocker-type technology, which is applied in the field of mobile robot design, can solve problems such as the space influence of the built-in differential balance mechanism, and achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with drawings and embodiments.
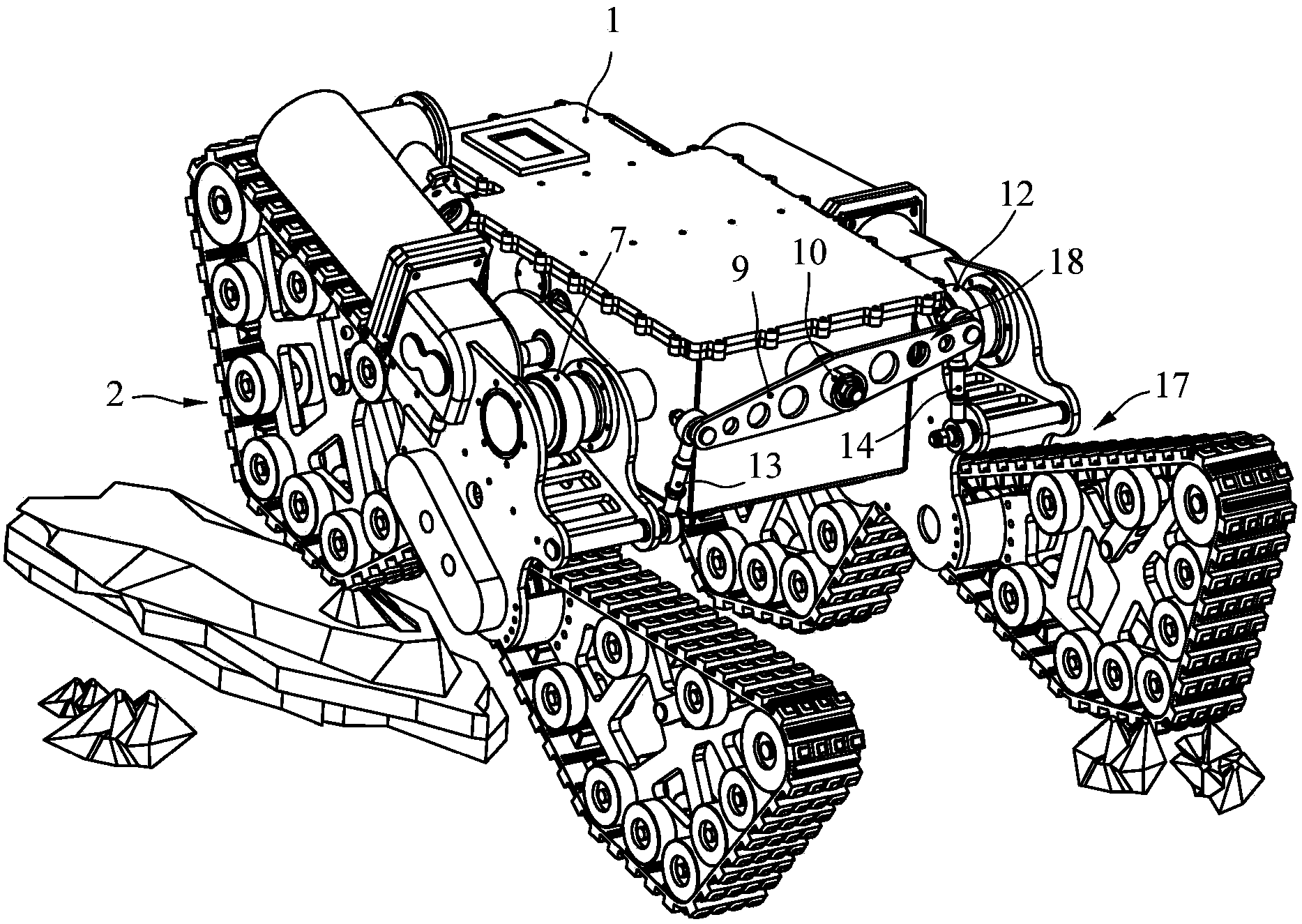
[0013] figure 1 Among them, the present invention includes the main vehicle body 1, the double trapezoidal crawler suspensions 2, 17 arranged symmetrically on the left and right sides of the main vehicle body 1, and the double trapezoidal crawler suspensions 2, 17 connecting the main vehicle body 1 and both sides. Link type differential balance mechanism 18; the middle parts of the two double-trapezoidal crawler suspensions 2, 17 are respectively hinged with the left and right sides of the main vehicle body 1 by rotating pairs 7, 12, and the two pairs of rotating pairs 7, 12 are Axis; the link type differential balance mechanism 18 is composed of a geometrically symmetrical rocker 9 and two side links 13, 14, the middle of the rocker 9 is connected to one end of the main vehicle body 1 with a rotating pair 10 Hinged, and the swivel joint 10 is on the left and right mid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com