


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Anti-disturbance pid controller for unstable time-delay process and its design method
A design method and controller technology, applied in the field of theory and direct synthesis, which can solve problems such as unfavorable and harmful actual production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
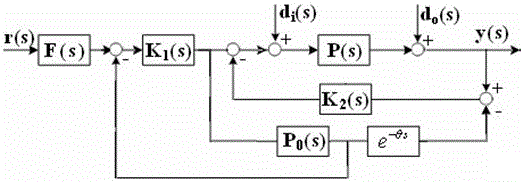
[0059] Embodiment 1: An anti-jamming PID controller for an industrial unstable time-delay process, which tracks the controller K by the set value 1 (s), disturbance resistance controller K 2 (s), filter F(s), controlled process identification model P(s)=P 0 (s)e -θs and three signal mixers, the first of which is set at the setpoint controller K 1 At the input terminal of (s), it has a positive polarity input terminal and a negative polarity input terminal, and its output is connected to the set value tracking controller K 1 (s); the second signal mixer is set at the setpoint tracking controller K 1 (s) output terminal, it has one positive polarity input and one negative polarity input, its output is connected to the input terminal of the actual controlled process P(s), the third signal mixer is set in the actual controlled process P(s ), it has one positive input terminal and one negative input terminal, and its output terminal is connected to the disturbance rejection con...
Embodiment 2
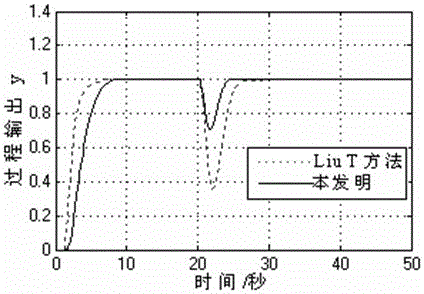
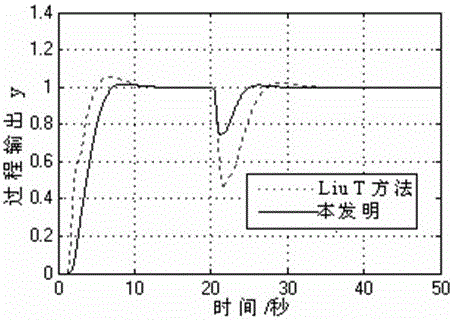
[0096] Embodiment 2: Investigate Liu T and Zhang w D, in document Analytical design of two-degree-of-freedom control scheme for open-loop unstable processes with time delay. (Journal of Process Control, 2005,15 (5): 559 -572) a chemically unstable time-delay process studied in
[0097] P ( s ) = 1 s ( s - 1 ) e - 0.2 s
[0098] For the above unstable time-delay process, in the literature, Liu T and Zhang w D proposed a two-degree-of-freedom control structure, using the robust H 2 The optimal control performance index is designed to obtain the given value tracking controller and the disturbance suppression controller as
[0099] C ′ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com