Three-plane-branch six-degree-of-freedom parallel wall-climbing robot
A wall-climbing robot and a degree of freedom technology, applied in the field of robotics, can solve problems such as poor flexibility, affecting the accuracy of positioning and processing operations, and complex structure of traction legs, and achieve the effects of strong adsorption capacity, simple control, and flexible movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
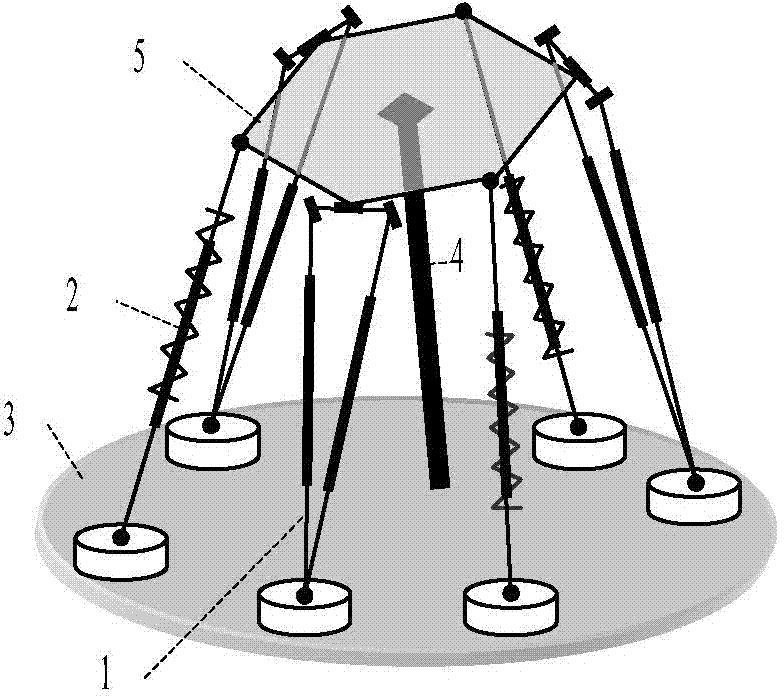
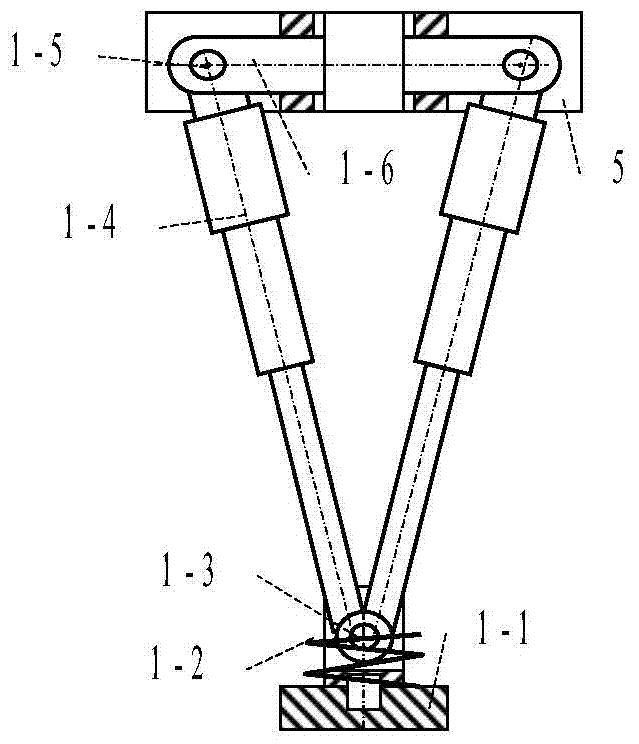
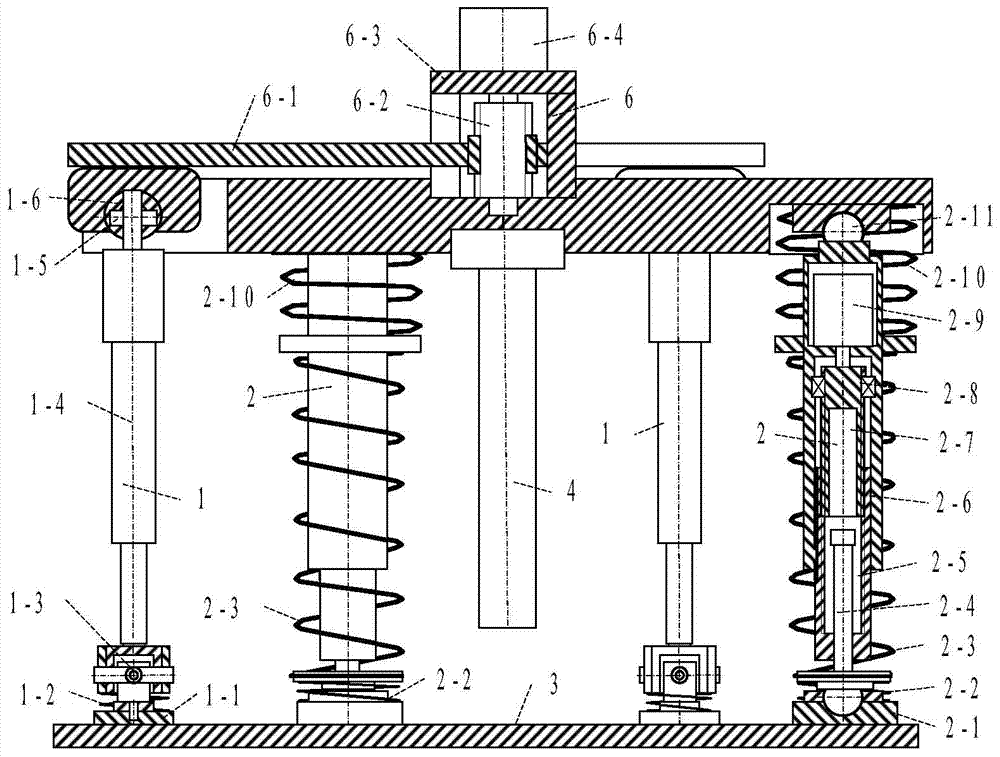
[0018] exist figure 1 and image 3 In the schematic diagram of the three-plane branch six-degree-of-freedom parallel wall-climbing robot shown, the laser gun 4 is fixedly connected to the center of the moving platform 5, and the three planar branches 1 and three traction legs with the same structure are between the moving platform and the magnetic workpiece 3 Distributed alternately and uniformly around the circumference. like figure 2 As shown, the three planar branches with the same structure include two driving legs 1-4 with the same structure consisting of two telescopic rods. The two ends are connected, and the two ends of the horizontal shaft are provided with rotating auxiliary holes parallel to each other and perpendicular to the axis of the horizontal axis. A cam is fixed in the middle of the horizontal shaft, and the two sides of the cam are connected with the moving platform through the rotating pair. The lower end is connected with the permanent magnet sucker 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com