Spacecraft rendezvous and docking multi-degree-of-freedom semi-physical simulation method and device thereof
A space vehicle and semi-physical simulation technology, applied in the field of simulation, can solve problems such as application limitations, and achieve the effect of simple structure, wide application range, and multiple degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
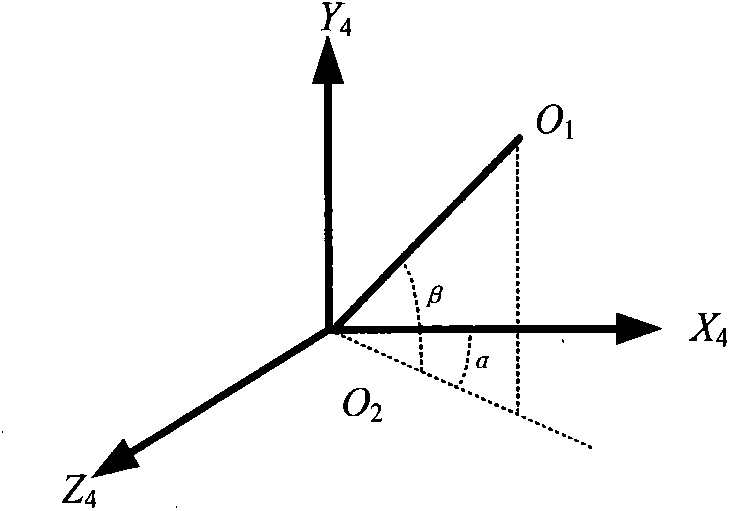
[0014] combine figure 1 , this example is mainly to illustrate the process of establishing a dynamic model of the system. After the system is modeled, the force of the flight simulator can be clarified, and the force is artificially applied to simulate the real situation of the aircraft in space. In addition, in the calculation process of the actuator index of the simulation system, it also needs to be applied to the dynamic model of the system.
[0015] Model the rendezvous and docking system according to the principle of space dynamics, and obtain the space rendezvous and docking dynamic model:
[0016] x . . - 2 ω y . = a x ...
Embodiment 2
[0026] This example mainly explains how to determine the simulation scaling. The simulation scaling ratio is represented by k in this paper, which refers to a ratio of the laboratory simulation environment range to the space rendezvous and docking simulation range, and it is generally a positive number less than 1.
[0027] First, determine the sensor selection scheme according to the simulation requirements; at the same time, determine the appropriate simulation scale according to the sensor accuracy requirement formula and the actual data of the space rendezvous and docking in the middle and long distance, combined with its own laboratory conditions.
[0028] For example: the real relative distance between the long-range tracking aircraft and the target aircraft in space is about 10km. The simulation scale and the precision required by the simulation system should satisfy the following relationship:
[0029] ρ ...
Embodiment 3
[0037] This example mainly introduces the calculation method for the actuator index of the simulation system.
[0038] The dynamic model of the system has been introduced above, which satisfies the Hill equation. By solving the Hill equation, the ideal solution of the motion position and velocity of the system can be obtained.
[0039] Position solution:
[0040] x = x 0 + 6 ( θ - sin θ ) y 0 + ( 4 sin θ - 3 θ ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com