Automatic guide and obstacle avoidance method for robot
A robot and obstacle avoidance technology, applied in the field of robots, can solve problems such as small viewing angle and visual distance, relatively high environmental requirements, and failure of positioning and navigation, achieving the effects of good adaptability, wide application range and convenient deployment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
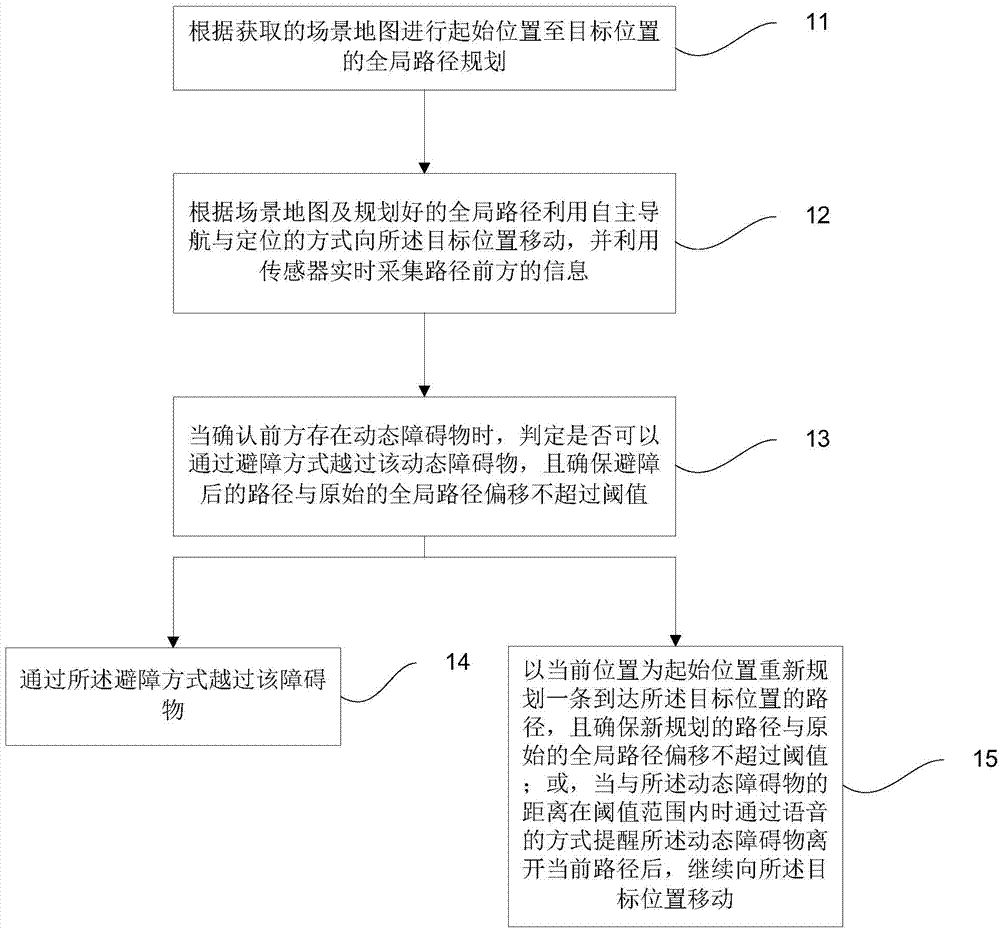
[0023] figure 1 It is a schematic diagram of a method for autonomous guidance and obstacle avoidance of a robot provided in Embodiment 1 of the present invention. Such as figure 1 As shown, it mainly includes the following steps:
[0024] Step 11. Perform global path planning from the starting position to the target position according to the acquired scene map.
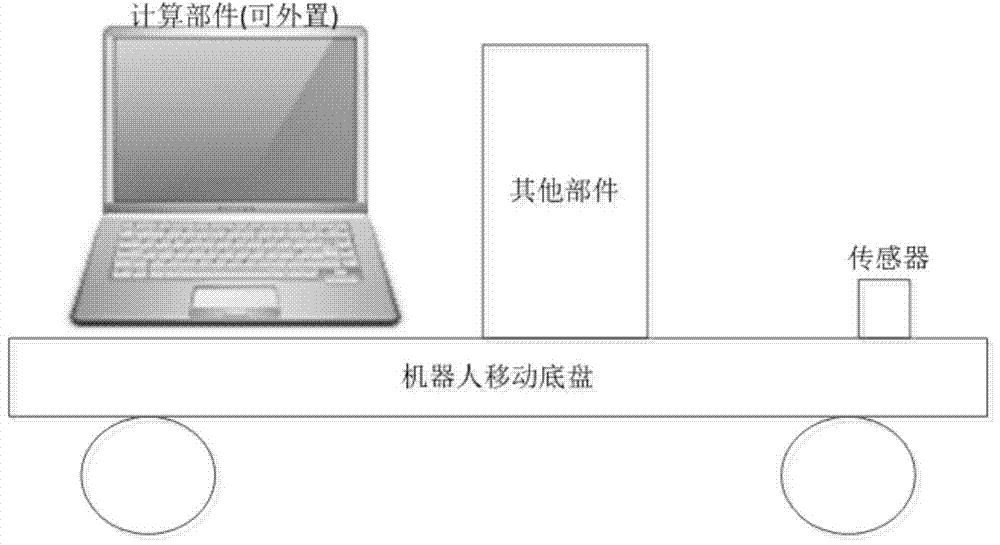
[0025] The robot in the embodiment of the present invention such as figure 2 As shown, it may include: a robot chassis with a walking feedback function, sensors placed on the robot chassis (for example, laser sensors, 10-30m range, 2-3cm accuracy), and a computer connecting the robot chassis and sensors Components (for example, computer intel i3 and above cpu, 4G memory).
[0026] The autonomous navigation and positioning of the embodiments of the present invention are all implemented based on sensors, and it is necessary to obtain a complete scene map of the current scene for positioning before performing path p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com