Parallel vector propulsion mechanism of autonomous underwater vehicle
An underwater vehicle and vector propulsion technology, which is applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of weakened rudder control effect and cannot meet the requirements of AUV complexity and flexibility, and achieve optimization Effects of dynamic performance, increased stiffness, and error avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in combination with specific embodiments.
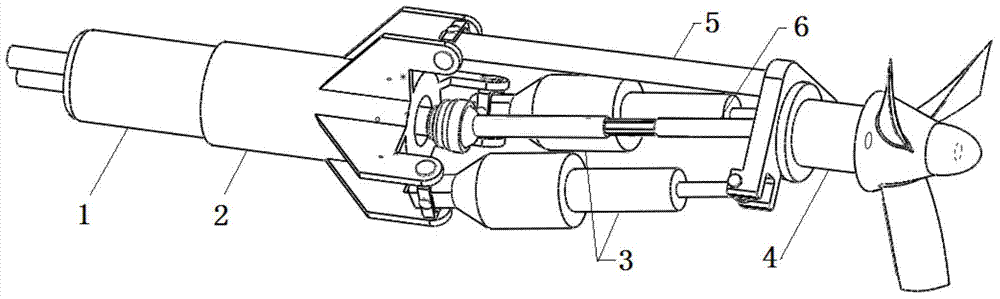
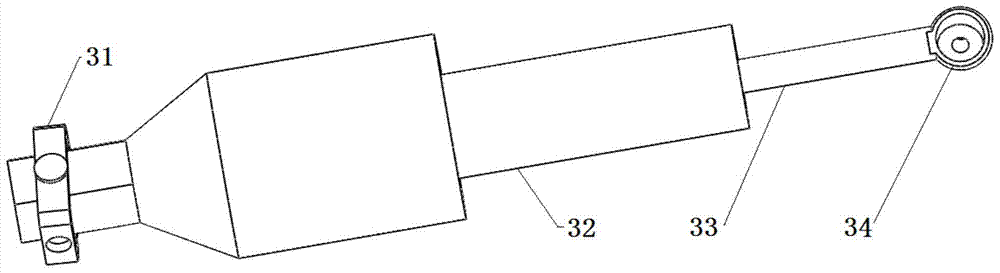
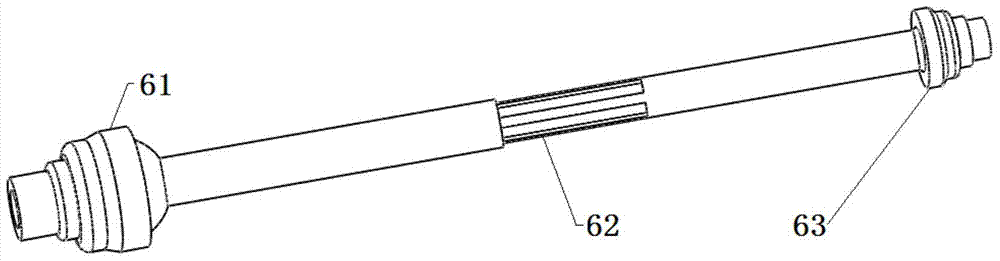
[0017] The invention relates to a parallel vector propulsion mechanism of an autonomous underwater vehicle, comprising a static platform and a dynamic platform, the static platform is provided with a propeller main propulsion motor, the dynamic platform is provided with a propeller drive shafting, and the static platform is There are three sets of branch chains between the moving platform, and the three sets of branch chains include two sets of six degrees of freedom U P The S active branch chain and a set of U branch chains with two degrees of freedom, the static platform, the dynamic platform and the three groups of branch chains form a two-degree-of-freedom spherical three-bar parallel mechanism, and the two-degree-of-freedom U branch chain and the dynamic platform Solid connection, the two-degree-of-freedom U branch chain is perpendicular to the plane where th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com