Two-hand rubbing simulation mechanism
A two-handed, frame-based technology, applied to mechanical equipment, transmission devices, belts/chains/gears, etc., can solve the problems of high cost, high cost, complex structure, etc., and achieve high work reliability, widely popularized and used, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
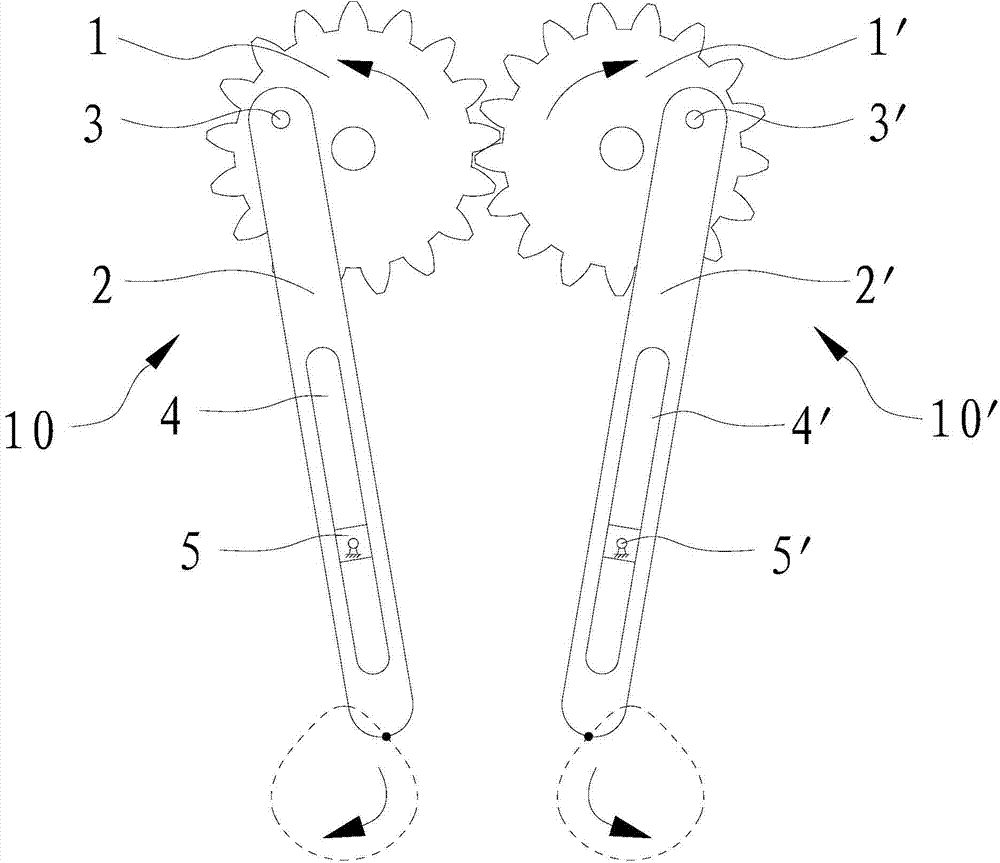
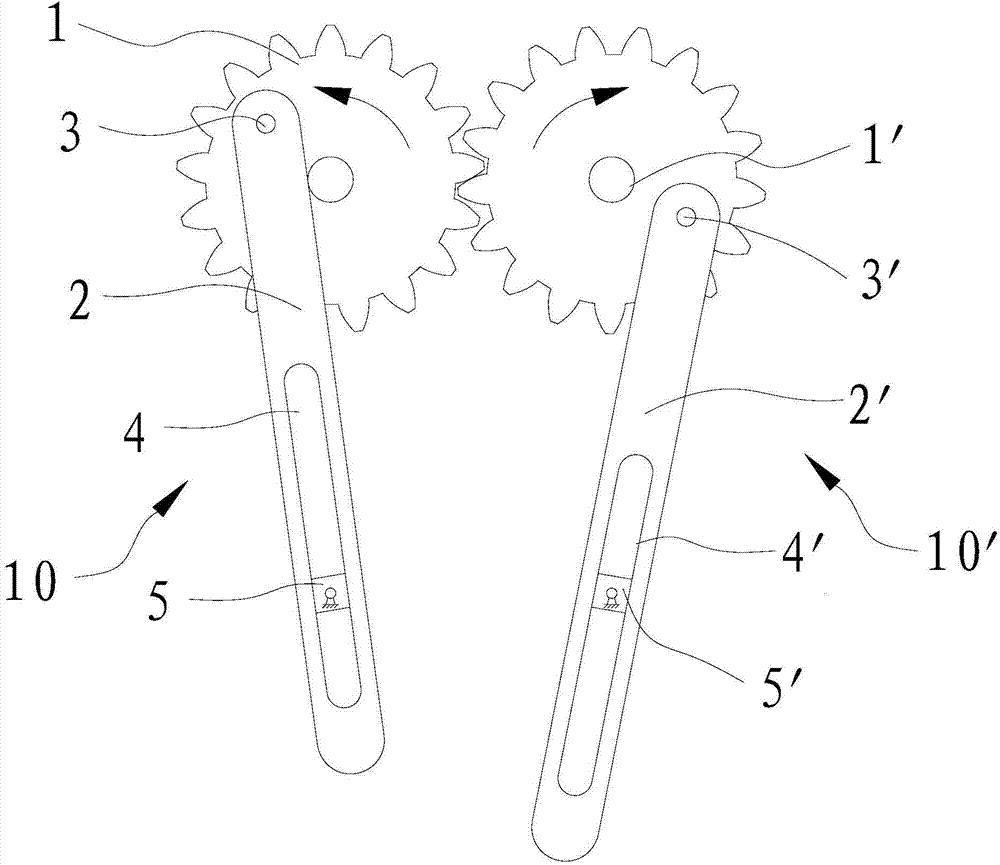
[0025] see figure 1 , figure 2 The shown hands-rubbing bionic mechanism includes a frame (not shown in the figure), and two sets of rubbing components 10, 10' arranged on the frame.
[0026] The kneading assembly 10 includes a gear 1 rotatably arranged on the frame around the axis, and a connecting rod 2 rotatably arranged on the gear 1 through a pin shaft 3 . There is an eccentric pin hole on the gear 1, the center line of the pin hole is parallel to the axis line of the gear 1, one end of the pin shaft 3 is connected to the upper part of the connecting rod 2, and the other end is rotatably passed through the above pin hole middle. A chute 4 is provided on the connecting rod 2, and the chute 4 extends along the length direction of the connecting rod 2. The frame is provided with a slider 5 hinged at the center on the frame for providing the guidance of the connecting rod 2, that is, the slider 5 The center positions of the two axial ends of the shaft are hinged on th...
Embodiment 2
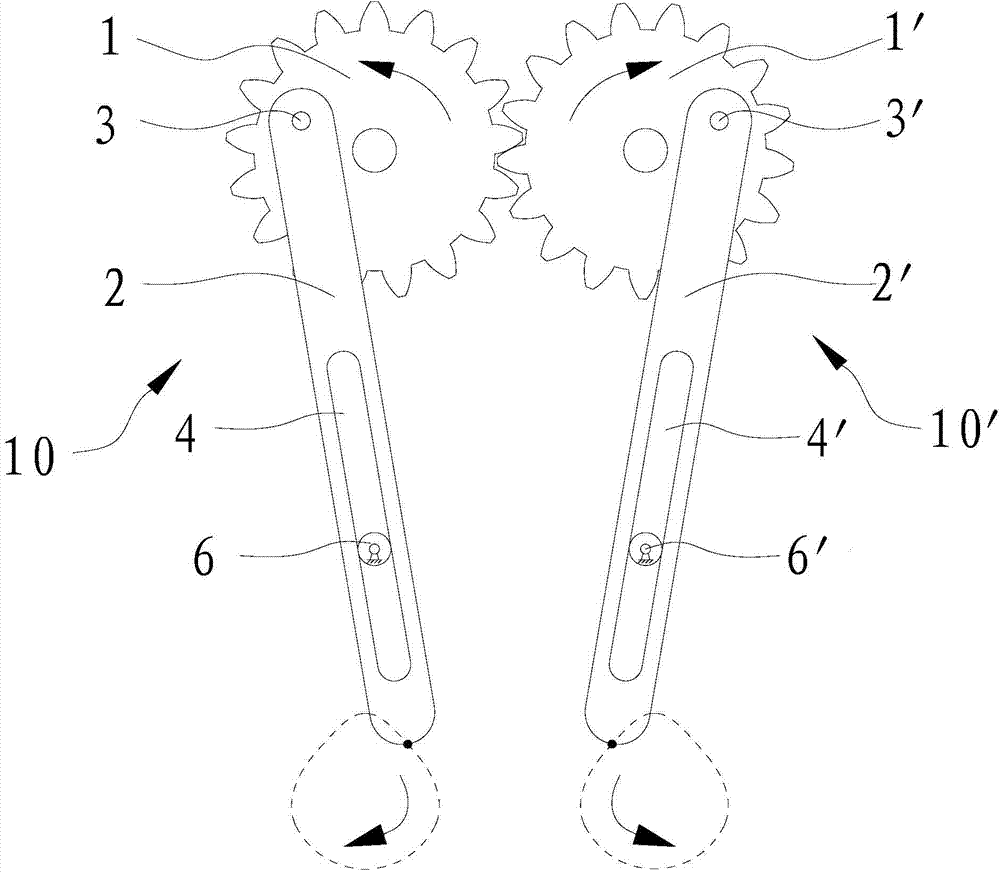
[0035] see image 3 Shown both hands kneads bionic mechanism, the difference of this bionic mechanism and embodiment 1 mainly lies in the setting of the parts that provide connecting rod 2, 2 ' guide. In this embodiment, the guide member 6, 6' provided on the frame is centered on the part providing the guide of the connecting rod 2, 2', and the guide member 6, 6' is respectively arranged in the chute 4, 4' with loose fit. Among them, the circumferential outer surface of the guides 6, 6' matched with the longitudinal groove walls of the chute 4, 4' is a cylindrical surface, and the guides 6, 6' form a plane height pair with the chute 4, 4' respectively. When the external driving mechanism drives one of the gears 1 and 1' to rotate, the connecting rods 2 and 2' are respectively operated by the pin shafts 3 and 3' relative to the guides 6 and 6' on the cylindrical outer surface. The rectilinear motion swings again, so that the lower ends of the connecting rods 2, 2' can produc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com