A deformable multipurpose soft robot
A robot, multi-purpose technology, applied in the field of robots, can solve the problems of narrow passage, difficulty in autonomous movement of robots and obstacle crossing, and inability of rescuers to conduct in-depth reconnaissance or rescue, and achieve the effect of reducing the size of the external design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The specific embodiments of the present invention will be further described in detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
[0025] Such as Figure 1 to Figure 6 As shown, a deformable multi-purpose soft robot includes a ring-shaped elastic housing 1 with a cavity at the axial center, and a skeleton 4 for installing a camera 2 and a load 3 is provided in the cavity. A driving unit is provided between the outer side wall and the inner side wall of the elastic housing 1.
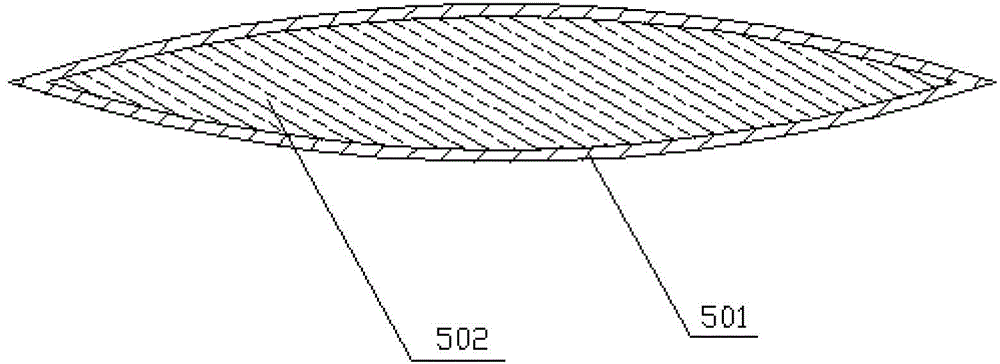
[0026] The driving unit includes a number of fluid cells 5 and an equal number of driving tubes 6. The fluid cells 5 are connected end to end to form a circle, and the fluid cells 5 include a cell wall 501 and an incompressible fluid 502 arranged in the cell wall. The driving tube 6 is arranged inside the fluid cell 5, the driving tube 6 is bridged on two adjacent flui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com