Bionic soft robot based on hydrostatic skeleton mechanism property
A robot and bone technology, which is applied in the field of bionic soft robots based on the mechanism and characteristics of hydrostatic bones, can solve the problems of narrow operating environment, difficulty in autonomous movement and obstacle crossing of robots, and inability to reach the operating site, and achieves a reduction in the size of the shape design. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
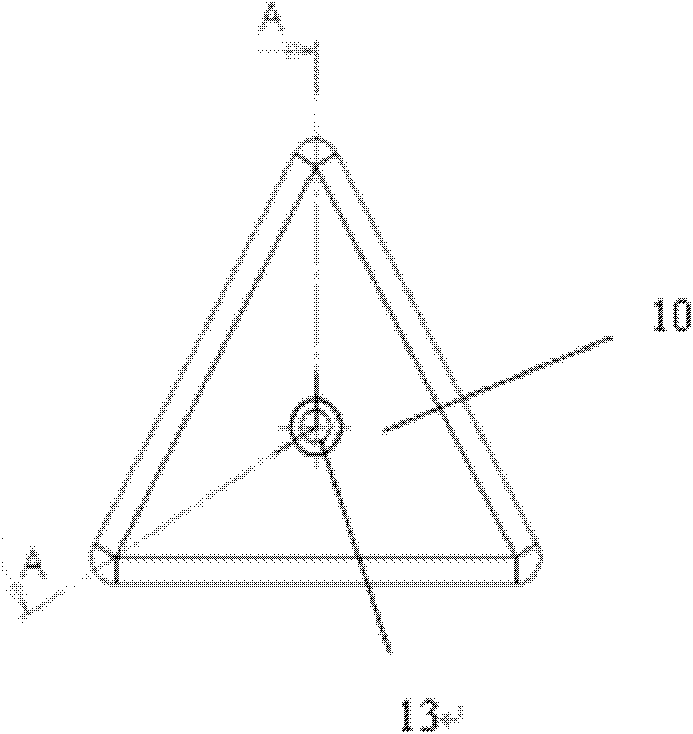
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0023] like figure 1 , figure 2 and image 3 As shown, the overall structure of the bionic soft robot of the present invention is mainly composed of an elastic shell 1 , an incompressible fluid 2 and a loading device 3 . The above-mentioned elastic shell is a spherical structure of the front body, which is composed of twenty cell units 10, and each cell unit 10 is an equilateral triangle with equal faces, sides and angles. The outer wall of the cell unit is made of elastic material—silica gel (xSio2·yH2O), and the interconnected edges of each cell unit are glued to each other with Ecoflex elastic material, so that the overall structure of the shell is strictly closed. Each cell unit includes an outer cell wall 11, a cell cavity, a magneto-rheological fluid 12, a micro-electromagnetic driving device and a cell unit controller, and a connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com