Navigation computer of optical fiber gyro strapdown system based on OMAP
A technology of navigation computer and fiber optic gyroscope, applied in the field of navigation computer, can solve the problem of low efficiency of navigation solution, and achieve the effects of good function, improved efficiency, and reduced size and power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
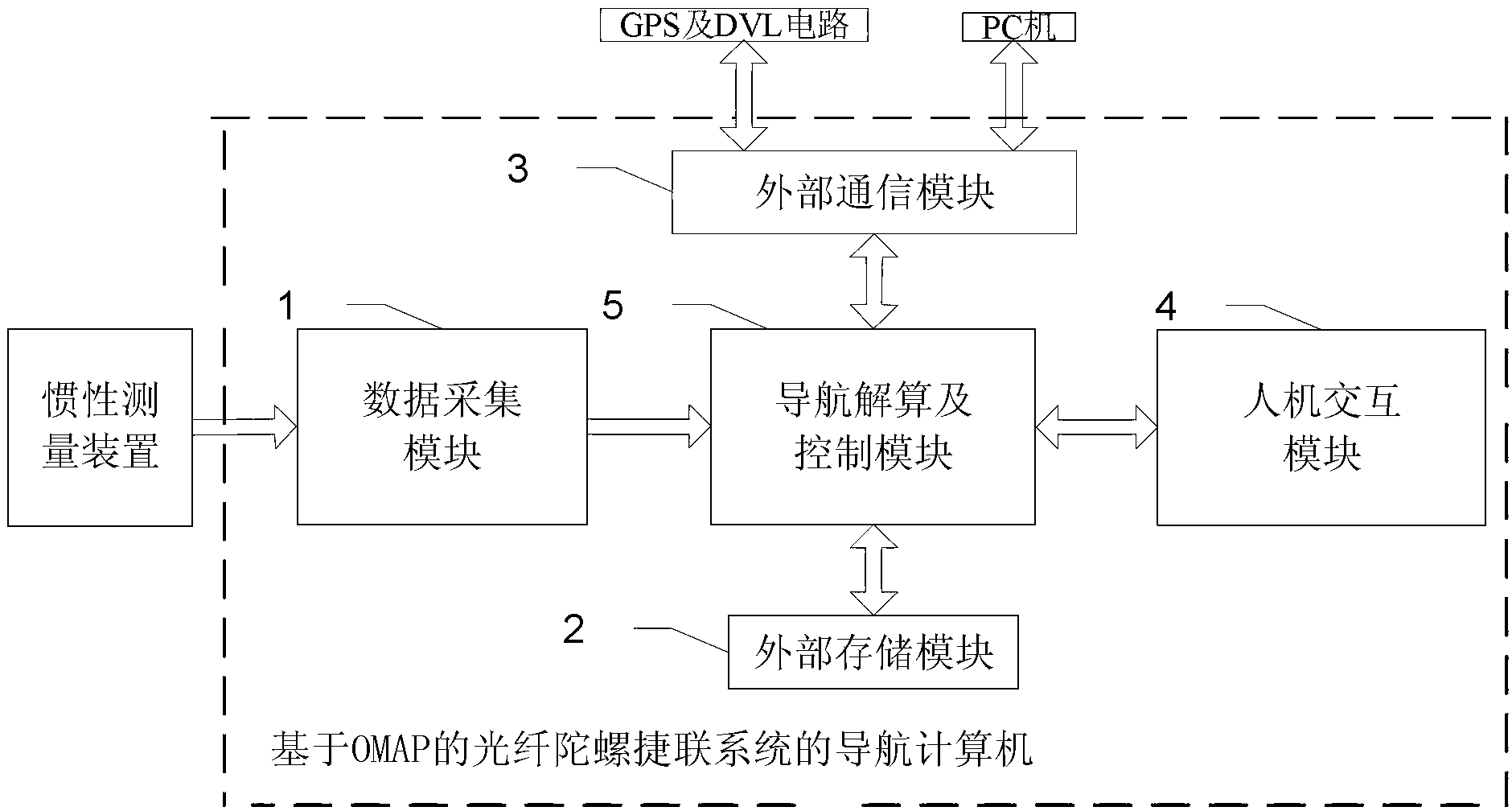
[0019] Specific implementation mode one: combine figure 1 Describe this embodiment, the navigation computer of the optical fiber gyroscope strapdown system based on OMAP described in this embodiment,
[0020] It includes a data acquisition module 1, an external storage module 2, an external communication module 3, a human-computer interaction module 4, and a navigation solution and control module 5;
[0021] The three-way gyro signal and the three-way accelerometer signal output end of the data acquisition module 1 are connected with the three-way gyro signal and the three-way accelerometer signal input end of the navigation solution and control module 5, and the storage signal input and output ends of the external storage module 2 It is connected with the storage signal input and output terminals of the navigation solution and control module 5, and the communication signal input and output terminals of the external communication module 3 are connected with the navigation solu...
specific Embodiment approach 2
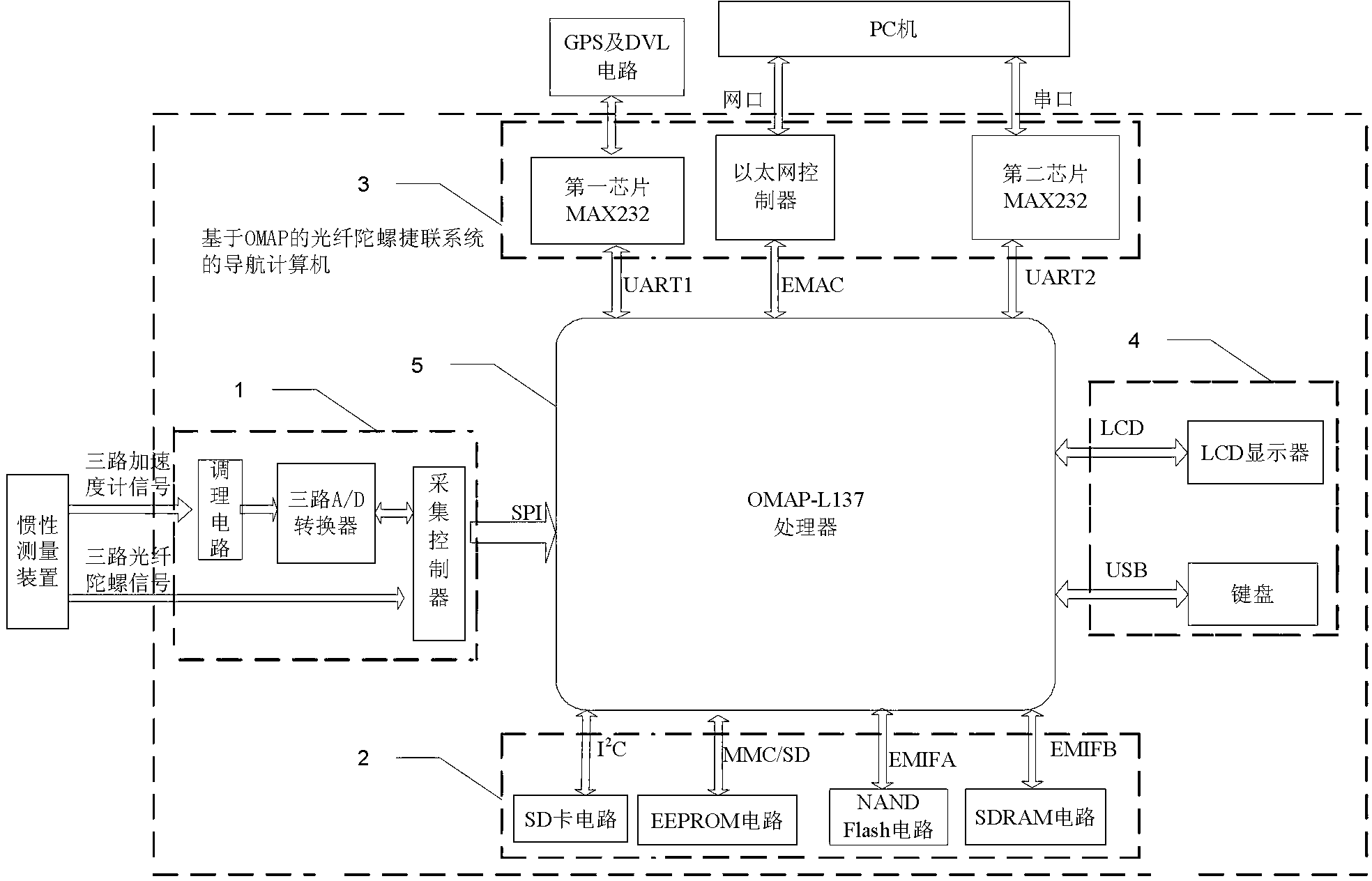
[0034] Specific implementation mode two: combination figure 2 Describe this embodiment, this embodiment is the further limitation of the navigation computer of the optical fiber gyroscope strapdown system based on OMAP described in specific embodiment one, described external storage module 2 comprises SD card circuit, EEPROM circuit, NAND Flash circuit and SDRAM circuit;
[0035] The OMAP-L137 processor is connected with the SD card circuit through the I2C interface,
[0036] The OMAP-L137 processor is connected to the EEPROM circuit through the MMC / SD interface,
[0037] The OMAP-L137 processor is connected to the NAND Flash circuit through the EMIFA interface,
[0038] OMAP-L137 processor is connected with SDRAM circuit through EMIFB interface.
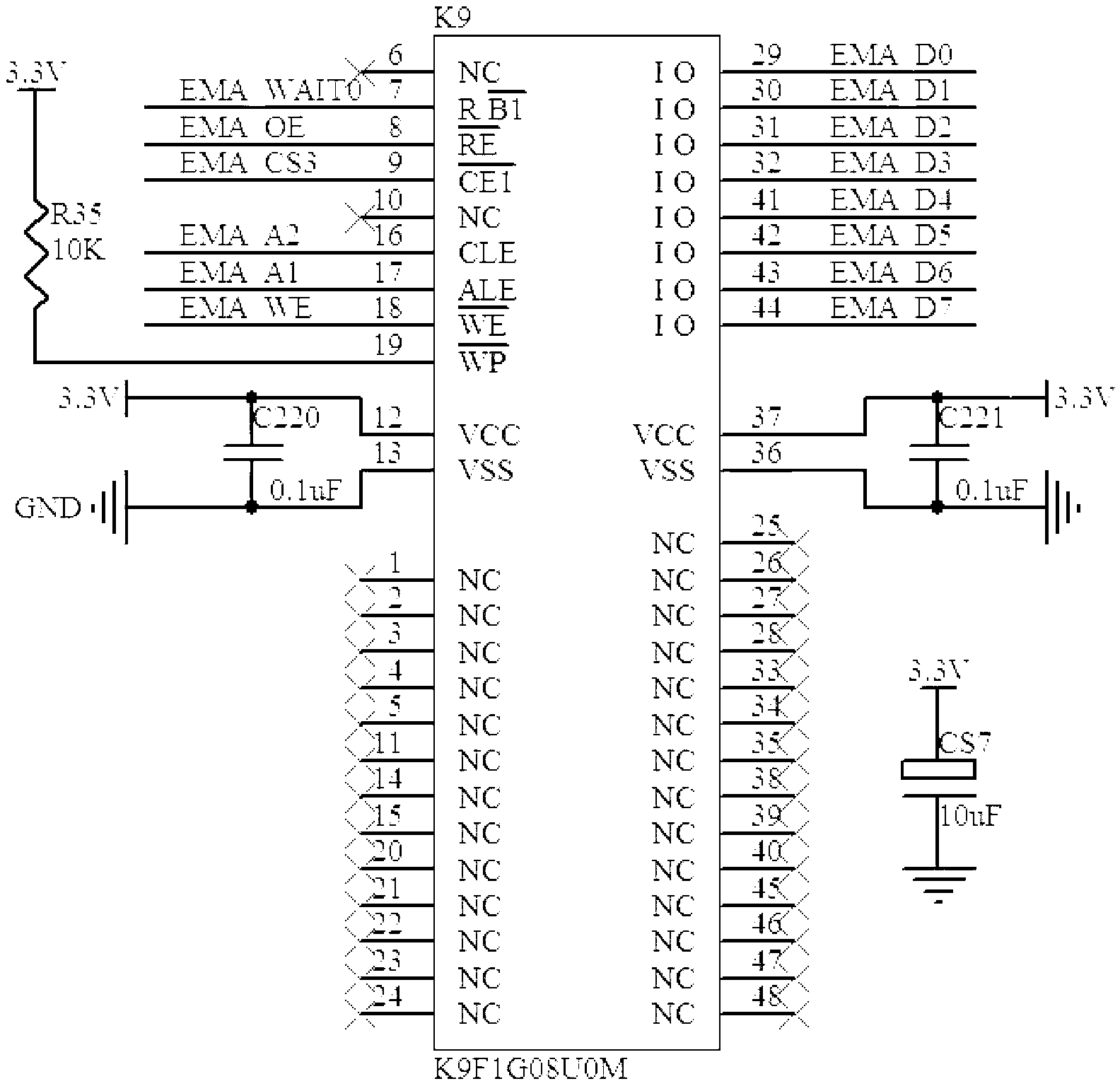
[0039]The EMIFA interface expands a NAND Flash chip K9F1G08UOM, which expands 128MB of non-volatile storage space for the processor, which is used to store program codes necessary for the system, such as embedded Linux kernel, f...
specific Embodiment approach 3
[0043] Specific implementation mode three: combination figure 2 Describe this embodiment, this embodiment is the further limitation to the navigation computer of the optical fiber gyroscope strapdown system based on OMAP described in specific embodiment one, described external communication module 3 comprises first chip MAX232, Ethernet controller, JTAG Interface circuit and the second chip MAX232;
[0044] The OMAP-L137 processor is connected to the communication signal input and output terminals of the first chip MAX232 through the UART1 interface;
[0045] The OMAP-L137 processor is connected to the communication signal input and output terminals of the Ethernet controller through the EMAC interface;
[0046] The OMAP-L137 processor is connected with the communication signal input and output terminals of the second chip MAX232 through the UART2 interface.
[0047] The EMAC interface is connected with the Ethernet controller KSZ8893M, and the extended 10Mbps / 100Mbps Ether...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com