Lifting-pushing type large-scale solar-powered unmanned aerial vehicle capable of taking off and landing in non-runway field and hovering
A solar-powered unmanned aerial vehicle, large-scale technology, applied to vertical take-off and landing aircraft, wings, motor vehicles, etc., can solve problems such as incompetence of manpower delivery, inability to perform fixed-point hovering missions, difficulties in take-off and landing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] Describe the present invention below in conjunction with specific embodiment:
[0037] This embodiment provides a non-runway field take-off and landing and hoverable lift-type large-scale solar unmanned aerial vehicle.
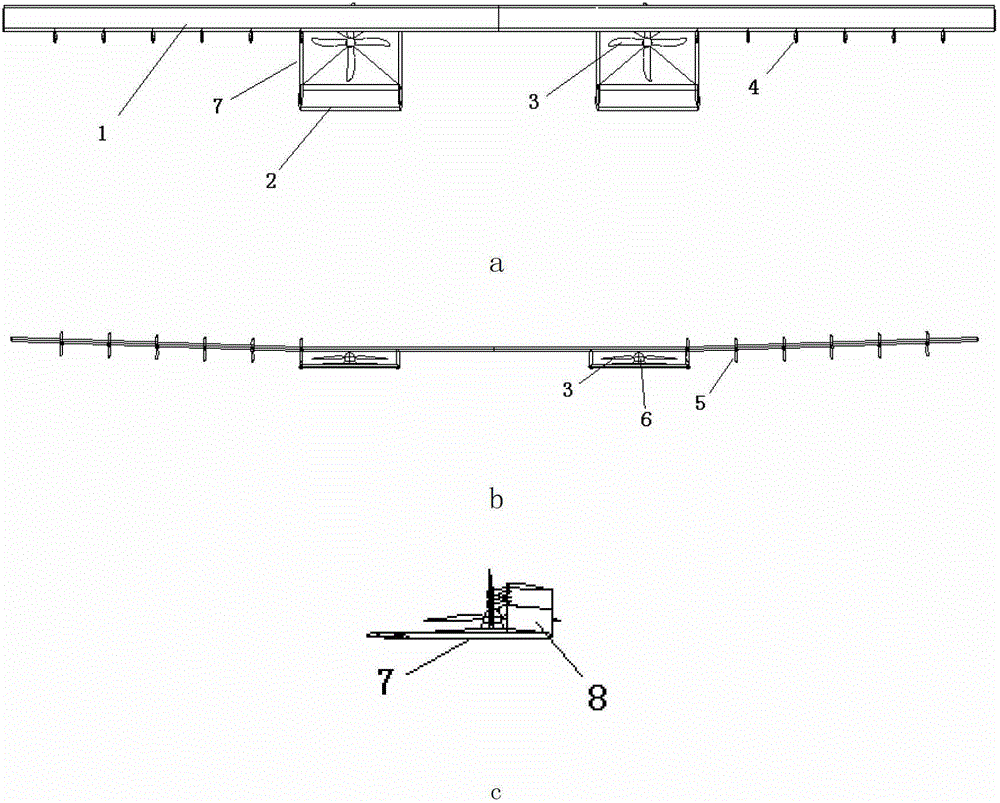
[0038] Refer to attached figure 1 , the push-up large-scale solar-powered UAV in this embodiment adopts double front wings and single rear wing. The front and rear wings are on the front and rear wings. wing.
[0039] Both the rear wing and the front wing are straight wings with equal chord length and single leading edge with 0°sweep angle to meet the laying requirements of solar cells. The chord length of the front wing and the rear wing is equal, and the chord length of the front wing and the rear wing is 2.5m in the present embodiment. The upper surface of the rear wing is fully covered with solar cells, and a total of 7,200 solar cells with a size of 125mm×125mm are laid. A full-span elevon is arranged at 20% to 25% of the chord length from the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com