Row cycle real-time adjustment system and method for large-view-field space camera
A technology of space camera and real-time adjustment, applied in the direction of photographic devices, etc., can solve problems such as difficulty in guaranteeing real-time performance, inconsistency of the real situation, and failure to consider the flattening of the earth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
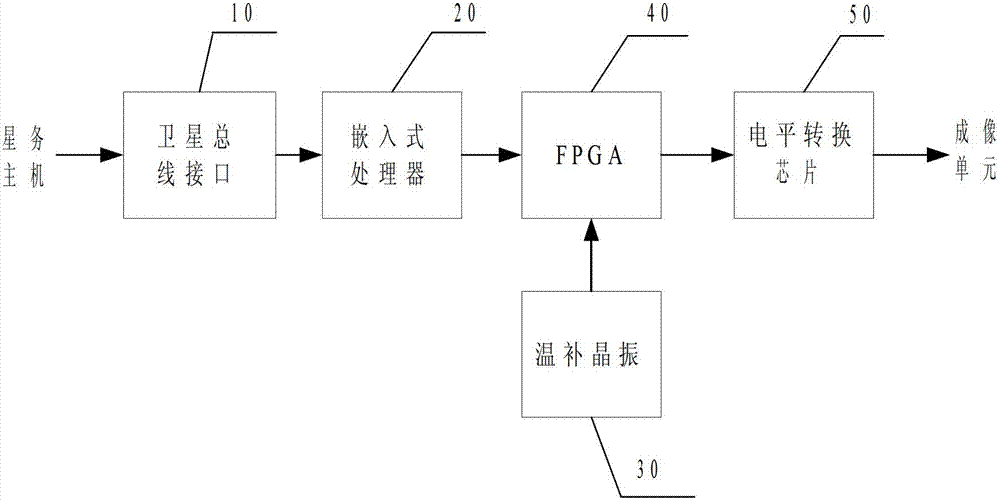
[0062] Specific implementation mode 1. Combination Figure 1 to Figure 4 Describe this embodiment mode, the real-time adjustment system of the line cycle of a large field of view space camera, including a satellite bus interface 10, an embedded processor 20, a temperature-compensated crystal oscillator 30, an FPGA 40 and a level conversion chip 50;
[0063] Satellite bus interface 10: It is composed of a bus protocol chip and a bus level conversion chip, and sends the data and instructions sent by the star host through the satellite bus to the embedded processor.
[0064] Embedded processor: receive data and instructions transmitted from the satellite bus interface 10; calculate each imaging in real time according to parameters such as the current position and speed of the satellite in the data, and the half field angle corresponding to the effective pixel center position of each imaging unit The line cycle code value corresponding to the unit. And the received imaging unit s...
specific Embodiment approach 2
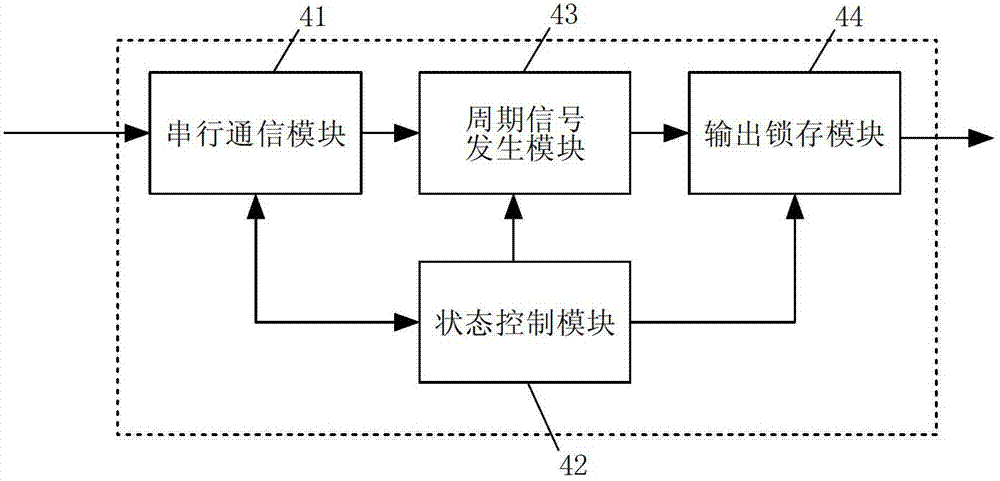
[0084] Specific embodiment two, combine Figure 5 to Figure 7 Describe this embodiment, the method for adjusting the line period of a large field of view space camera in real time; in this embodiment, assume that the current position of the satellite in the equatorial inertial coordinate system (X ECI ,Y ECI ,Z ECI ) and speed (VX ECI ,VY ECI ,VZ ECI ) are (-3080067.9, 2051763.6, -5974793.5) (unit: m) and (6241.45, -1768.87, -3824.97) (unit: m / s), respectively.
[0085] In step 110 , the embedded processor 20 receives data and instructions from the satellite bus interface 10 , and then proceeds to step 120 .
[0086] In step 120 , if the received imaging unit startup command or imaging unit shutdown command is received, go to step 130 , otherwise go to step 140 .
[0087] In step 130 , the imaging unit power-on command or the imaging unit power-off command is forwarded to FPGA 40 to control the enabling and disabling of the line cycle signal output, and then return to st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com