Multi-model adaptive pid control for EMU braking process
A braking process, EMU technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] The implementation of the present invention selects the CRH380AL type EMU as the experimental verification object, and its main parameter characteristics are shown in Table 3. Collect 417 sets of speed and running distance data of the EMU during the braking process of a certain line section, and use 278 sets of data as modeling data samples, and the remaining 139 sets of data as test data.
[0105] Table 3 Main parameter characteristics
[0106] parameter name
Parameter characteristics
Gross train weight / t
890
Maximum operating speed / (km h -1 )
380
Continuous operating speed / (km h -1 )
350
Unit basic resistance / (N·kN -1 )
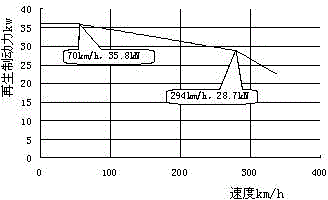
w=5.2+0.038v+0.00112v 2
[0107] First, according to the collected 1200 sets of modeling sample data, the optimal model number of the model can be determined to be 5 by subtractive clustering, and the model parameters are identified by the recursive least squares method. In order...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com