Track control method of cableless autonomous underwater vehicle (AUV)
A technology of underwater vehicle and control method, which is applied in the directions of self-adaptive control, three-dimensional position/channel control, general control system, etc., can solve problems such as the inability to complete the task of accurate tracking of track, and improve the accuracy of track tracking and work Reliable, simple and feasible effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
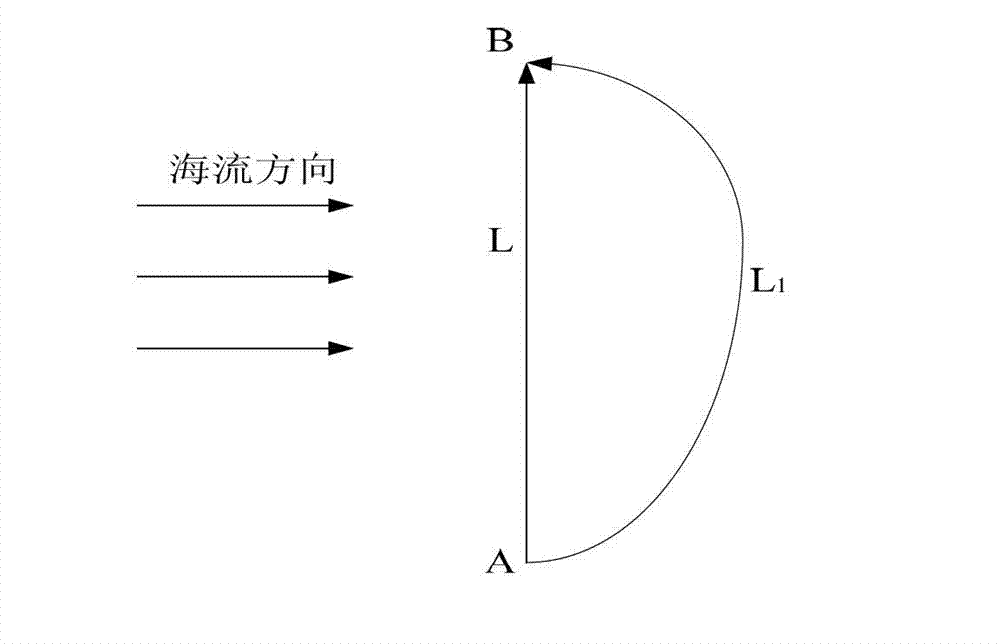
[0017] (1) Calculate the vertical distance ΔS from the current position of the AUV to the planned path (straight line), that is, the deviation ΔS of the AUV currently sailing along the planned route;
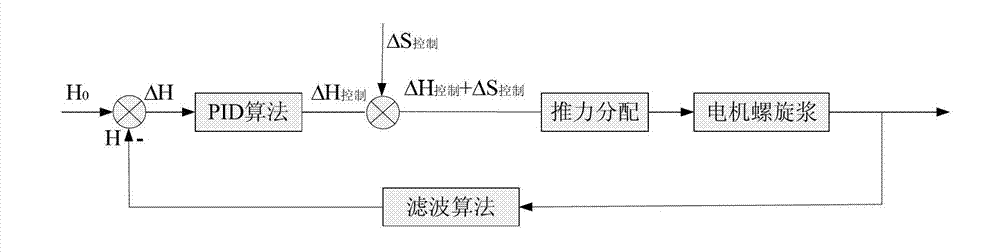
[0018] (2) Calculate the control amount ΔS of the AUV navigation path offset 控制 .
[0019] Using the PID algorithm to calculate the control amount ΔS of the offset of the AUV navigation path 控制 The standard PID algorithm is as follows:
[0020]
[0021] In order to be easy to realize in the computer, we discretize the above companies, and the PID control algorithm after discretization is:
[0022]
[0023] In the above, Kp, Ki, and Kd are proportional, integral, and differential coefficients, which need to be selected according to the characteristics of the entire system. ΔS is the distance deviation from the current position of the AUV...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com