Control device and method for upper limb movement training robot
A technology for sports training and motion control, applied to sports accessories, passive exercise equipment, gymnastics equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
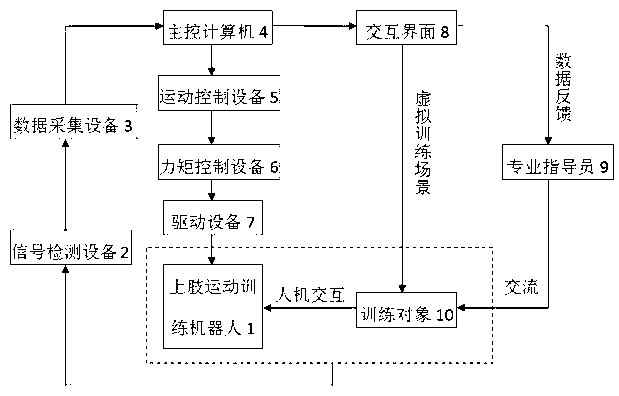
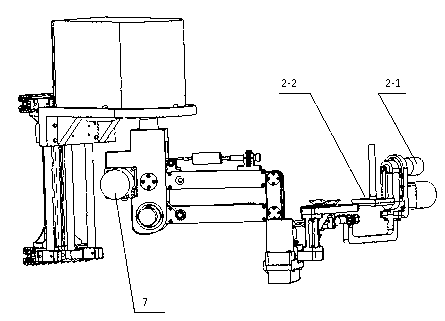
[0030] see Figure 1-Figure 7 , the upper limb exercise training robot control system includes an upper limb exercise training robot 1, a signal detection device 2, a data acquisition device 3, a main control computer 4, a motion control device 5, a torque control device 6, a driving device 7 and an interactive interface 8, wherein The signal detection device 2 and the driving device 7 are installed on the corresponding positions of the upper limb exercise training robot 1 through screw connection and key connection, the output line of the signal detection device 2 is connected to the corresponding port of the data acquisition device 3, and the data acquisition device 3 and the motion control device 5 is installed in the PCI slot of the main control computer 4, the corresponding output port of the motion control device 5 is connected with the corresponding terminal of the torque control device 6 through wires, the output port of the torque control device 6 is connected to the d...
Embodiment 2
[0031] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0032]The upper limb exercise training robot control system is characterized in that the upper limb exercise training robot 1 is a four-degree-of-freedom upper limb exercise training robot; the signal detection device 2 includes an encoder and a force sensor, wherein the encoder can be selected from Omron E6J-CWZ1EA2 type encoder, the force sensor is a four-dimensional force sensor that can detect the force in three orthogonal directions and one torque; the data acquisition device 3 and the motion control device 5 can use Altai boards PCI2394 and PCI8640 respectively; the drive device 7 and torque control device 6 can choose Dongfang Motor TM203C-MSE torque motor and supporting torque controller respectively; main control computer 4 and interactive interface 8 can choose Advantech IPC-610MB industrial computer and supporting liquid crystal display.
Embodiment 3
[0034] The control method of the upper limb exercise training robot adopts the control system of the upper limb exercise training robot according to claim 1, and is characterized in that: the control method includes ① passive control along a predetermined trajectory, ② active control of free movement, and ③ along Active control of predetermined trajectory Three control training methods:
[0035] ① Passive control training is used in the initial stage of exercise training. The upper limb exercise training robot 1 moves according to a predetermined trajectory to drive the upper limb movement of the training object 10. At this stage, the upper limb does not need to provide force and is completely driven by the upper limb exercise training robot 1 . At this time, the operation steps are as follows:
[0036] 1). Plan the movement trajectory according to the movement path that helps to improve the training effect;
[0037] 2). Solve the target pose of each joint through kinematics ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com