Three-dimensional mixed registration method in combination with visual registration and mechanical registration
A mechanical registration and three-dimensional registration technology, which is applied in image data processing, instruments, calculations, etc., can solve problems such as difficult integration into augmented reality systems, and achieve the effects of increased diversity, large spatial area, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
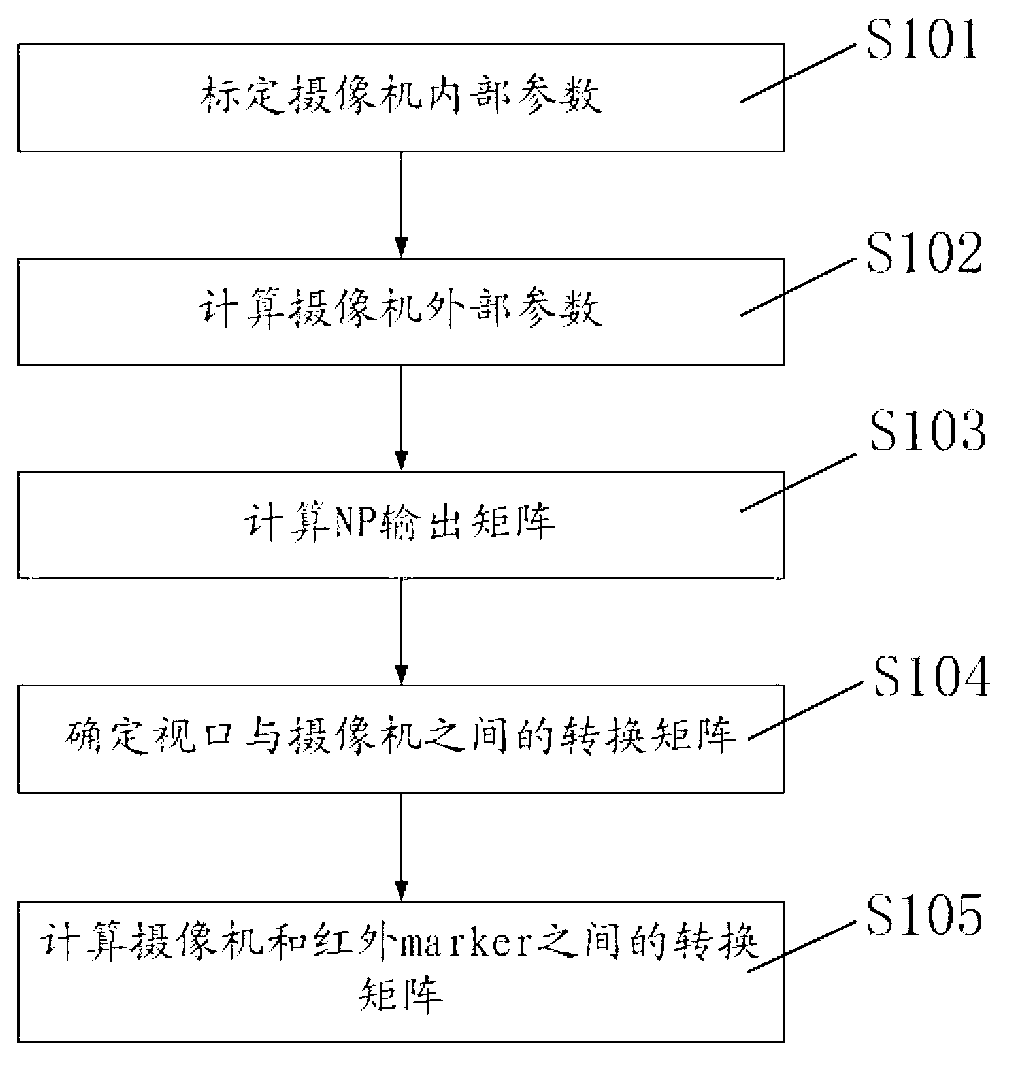
[0037] Such as figure 1 Shown, the concrete realization steps of the present invention are as follows:
[0038]Step S101, in step S101, two methods are required to determine the internal parameters of the camera when calibrating the camera. The specific method is to first use the calibration method of opencv to calibrate the camera to obtain the result R1=(fx1, fy1, cx1, cy1), where fx1 and fy1 are the focus distance, cx1 and cy1 are the coordinates of the main point on the image plane, and then use the matlab calibration method to get the result R2=(fx2, fy2, cx2, cy2), when the difference between the two |R1- When the value of R2| is less than n=(Δfx, ΔfyΔcx, Δcy), use R2 as the result of this internal reference calibration, otherwise, recalibrate until the condition |R1-R2|<n is met. The purpose of doing this is to avoid errors caused by manual operation as much as possible, so that the calibration of internal parameters can achieve the best results.
[0039] exist figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com