Mobile robot separating visual positioning and navigation method and positioning and navigation system thereof
A technology of visual positioning and navigation methods, applied in control/adjustment systems, two-dimensional position/channel control, instruments and other directions, can solve problems such as troublesome wiring, cumbersome wiring, low efficiency, etc., to achieve convenient line change, accurate positioning and navigation , the effect of high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
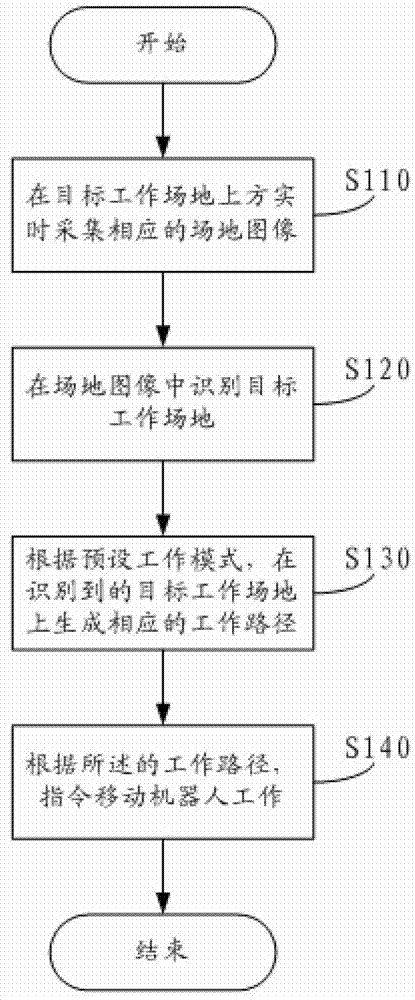
[0045] Such as figure 1 Shown, a kind of mobile robot separation vision positioning navigation method, comprises:
[0046] S110. Collect corresponding site images in real time above the target work site;
[0047] S120. Identify the target work site in the site image, including identifying the boundary and obstacles of the target work site;
[0048] Specifically, the range of the mobile robot's required operating site, that is, boundaries, obstacles, etc., can be set through automatic identification, human-computer interaction identification or manual identification.
[0049] Manuals can even set different types of boundaries or obstacles, and the mobile robot will handle them differently. For example, it can be set as ponds, bunkers, rockeries, trees, fences, etc. in lawn applications. When it is a pond or a bunker, sounding sensors or redundant vision positioning (that is, a margin) can be used to ensure that the robot does not fall. And rockery, trees, and fences can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com