Adaptive control method of rbf network for micro gyroscope based on global approximation of model
A RBF network, adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of inconvenience, low robustness, system instability, etc., to ensure boundedness, saving The cost of modeling, the effect of ensuring global stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
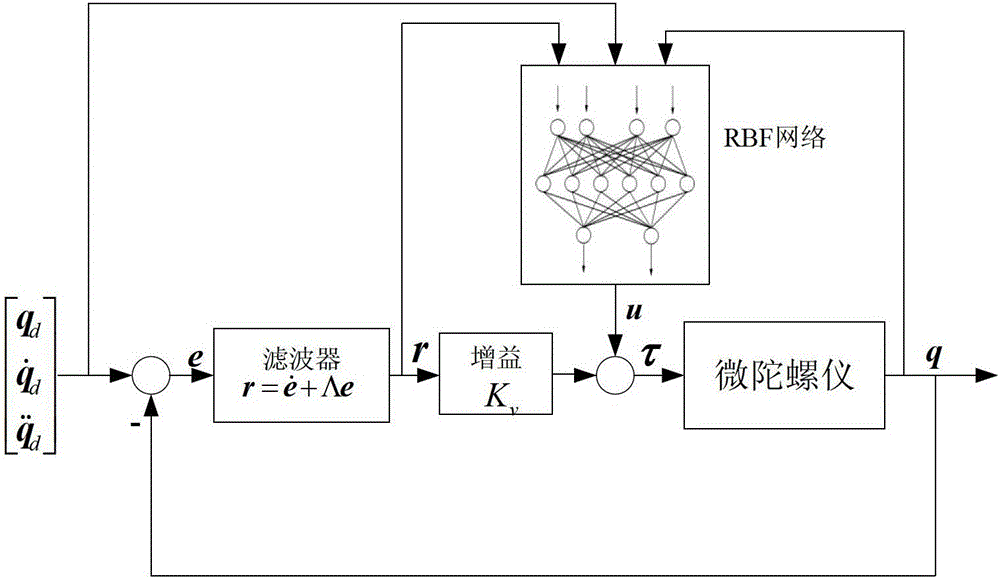
[0045]In order to further explain the technical means and effects that the present invention adopts to achieve the intended purpose of the invention, below in conjunction with the accompanying drawings and preferred embodiments, a kind of micro-gyroscope RBF network adaptive control based on the overall approximation of the model proposed according to the present invention The specific implementation, structure, features and effects of the system and method are described in detail below.
[0046] Establishment of filtering error model based on micro gyroscope
[0047] Considering the manufacturing error and external interference, the dynamic equation of the two-axis micromachined gyroscope is:
[0048]
[0049]
[0050] In the formula, m is the mass of the mass block; x, y are the positions of the mass block along the driving axis and the sensing axis respectively; d xx , d xy , d yy ,k xx ,k xy ,k yy Both are micro-gyroscope parameters, unknown and slowly time-var...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com