Intelligent trolley 2.5-dimensional visual servo control method based on nonlinear model prediction
A nonlinear model and intelligent car technology, applied in the field of intelligent robots, can solve problems such as motion execution system control constraints, camera visibility constraints, etc., to achieve improved reliability and safety, strong robustness, and simple implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
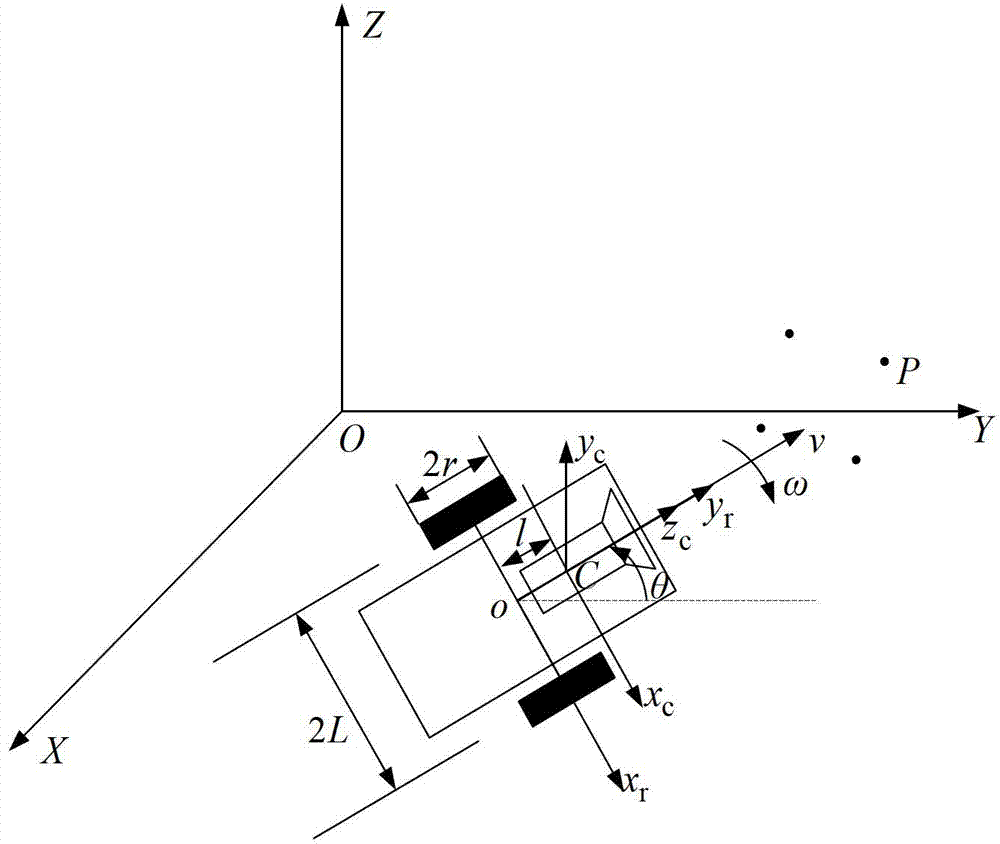
[0040] Such as figure 1 Shown is a two-wheel smart car system, the left and right wheels are driven independently, and the camera is fixedly installed on the car. O-XYZ, o-x r the yr , C-x c the y c z c They are the world coordinate system, the robot coordinate system and the camera coordinate system respectively. The center of mass o of the trolley is located at the center of the two driving wheels. The distance between the origin C of the camera and the center of mass o is l, r is the radius of the wheel, and L is the distance from the wheel to the center of mass. The task of visual servoing is to use the visual information obtained by the camera to control the movement of the car from the initial pose to the desired pose, and to ensure that the target is always visible during the movement.
[0041] The implementation steps are as follows:
[0042] 1) Obtain the current image and the expected image of the reference target through the camera at the current pose and the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com