Stability control method for rbiomimetic obosaur crawling
A technology of stability control and bionic machinery, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
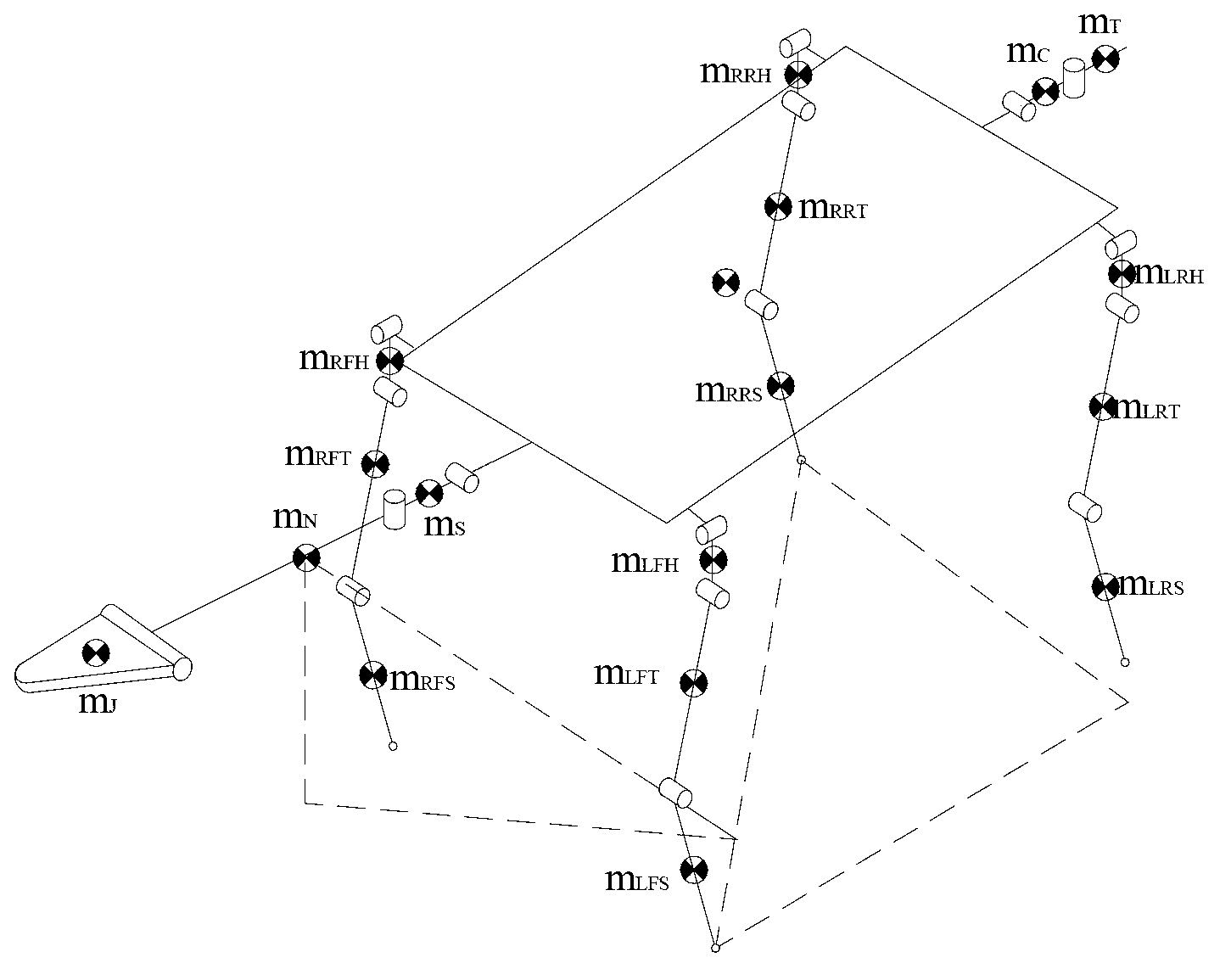
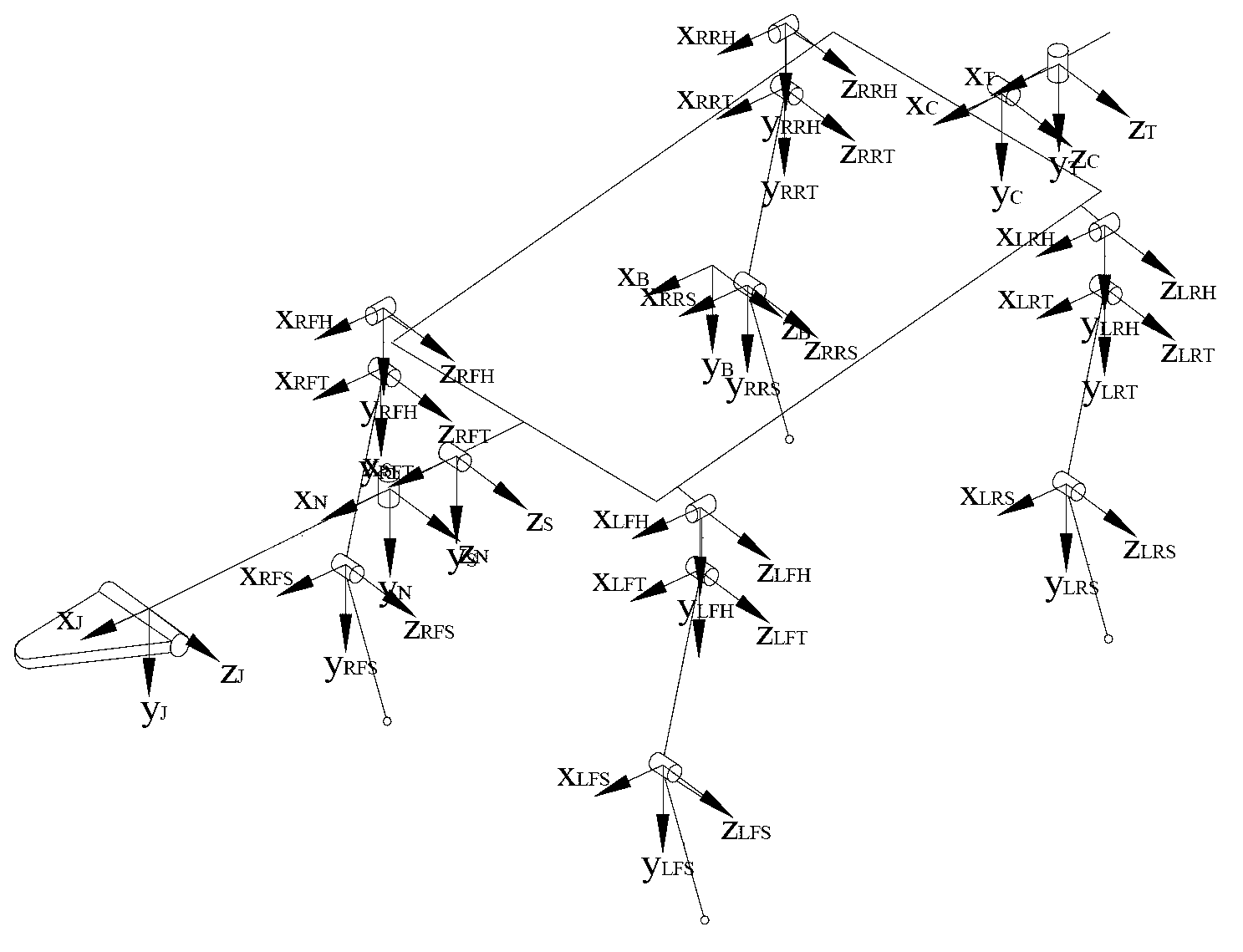
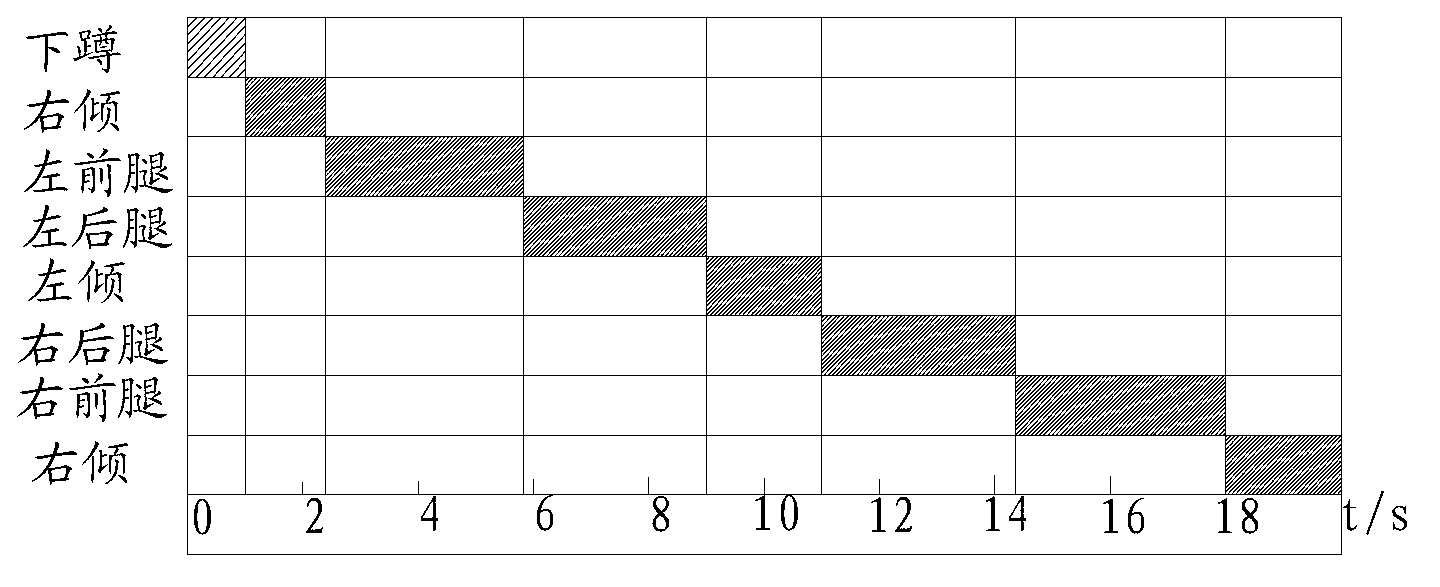
[0073] The crawling stability control method of the bionic mechanical dinosaur provided by the present invention fully considers that the large-scale quadruped bionic mechanical dinosaur is large in size, heavy in weight and relatively discrete in distribution, and the factors of the relatively large mass of the legs, head and tail are taken into consideration, and the bionic mechanical dinosaur The components of the limbs are simplified into a mass point system combined according to certain assembly and constraint relations, and then the D-H coordinate system is established. According to the motion functions of the thigh joint, calf joint and hip joint, the relationship between the body coordinate system B and the ground coordinate system G is used. Transformation matrix between Calculate the center of gravity of each limb component in real time, and obtain the overall center of mass position of the bionic mechanical dinosaur. The left and right tail swings adjust the overal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com