Self-driven sampling system and sampling method of a teleoperated robot
A technology of remote operation robot and sampling system, which is applied in the field of remote operation robot self-driven sampling system, achieving the effect of simple hardware connection relationship and simple and easy implementation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing, the present invention is further described in detail:
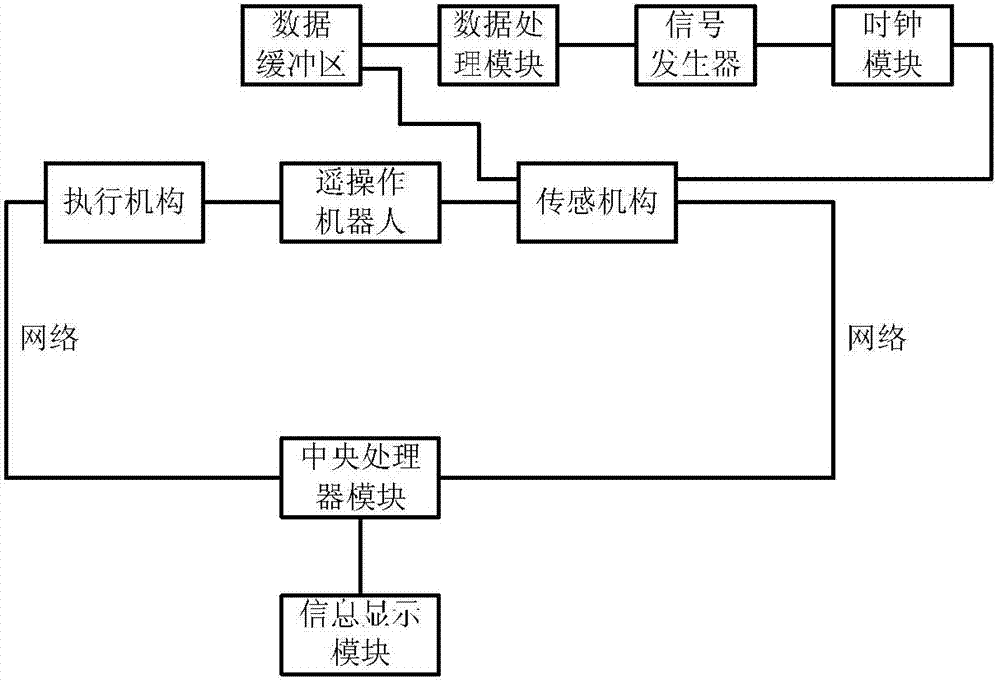
[0022] A remote operation robot self-driven sampling system according to the present invention consists of a remote operation robot, a sensing mechanism, a data buffer, a data processing module, a signal generator, a clock module, a central processing unit module, an executive mechanism, an information display module and Communication module and so on. At the same time, the invention discloses a self-driven sampling method of a teleoperated robot to adjust the sampling period to realize optimal utilization of channels.
[0023] The present invention according to the attached figure 1 The connection method in the paper connects the hardware of each device in the self-driven sampling system of the teleoperated robot. In order to facilitate the sampling of data such as the speed, direction, and angle of the manipulator joints of the teleoperation robot and the video im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com