Differential evadible system of electric field for unmanned aerial vehicle polling live wires and method
A live wire and drone technology, applied in the measurement of electrical variables, measurement devices, instruments, etc., can solve the problems of inaccurate results, no application examples, and no practicability, so as to improve reliability, ensure safety, Avoid volume effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
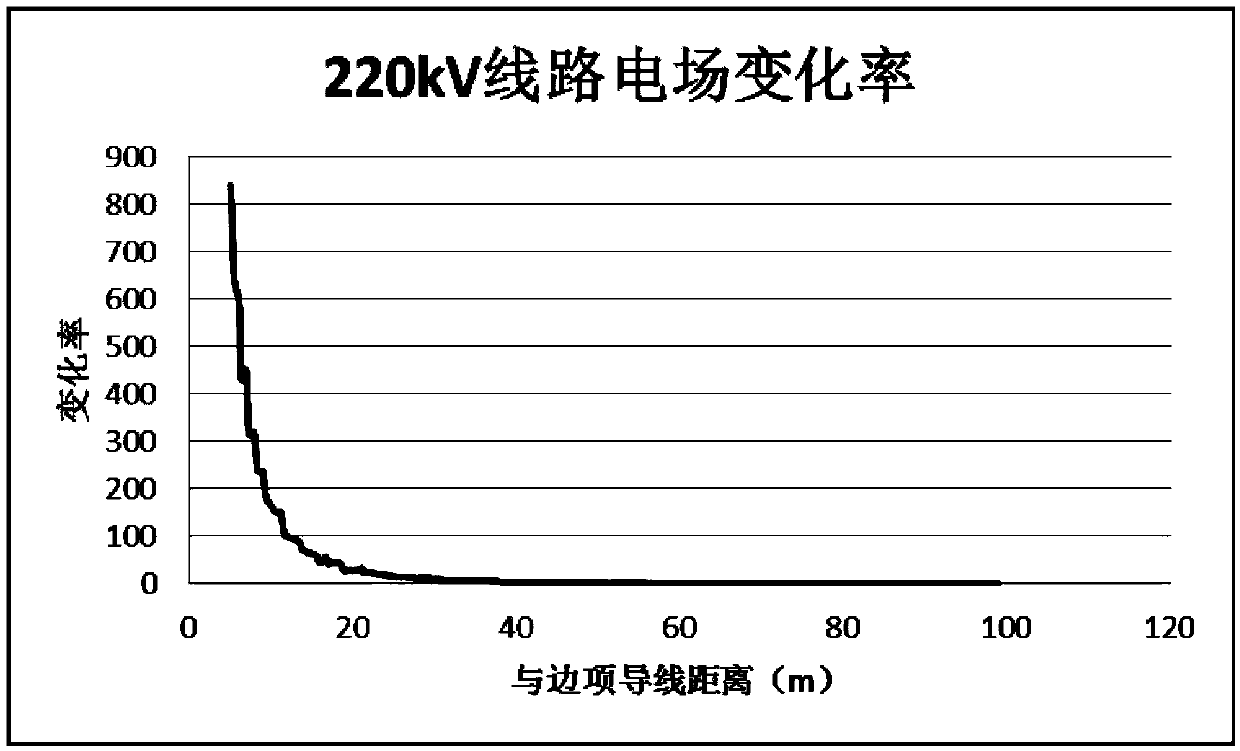
[0079] The electric field differential obstacle avoidance system is mounted on the UAV to detect the actual 220kV line. When the UAV is flying, the fuselage is basically parallel to the direction of the power transmission wire, which is equal to the height of the side wire. The flight route is 70 meters away from the side wire. Slowly approach the wire, until it is 16 meters away from the wire (this distance range is chosen to ensure the safety of the drone, and to verify whether the alarm signal of the electric field measurement obstacle avoidance system is received at the expected position halfway). In order to reduce the flight error, the flight conditions are selected as follows:
[0080] Weather: sunny and windless;
[0081] Patrol wire: as follows Figure 6 The wire in the middle of the straight line tower shown;
[0082] Set C220=29, l=0.22m, and conduct flight test.
[0083]In the middle of the flight, the UAV receives the alarm signal from the electric field measur...
Embodiment 2
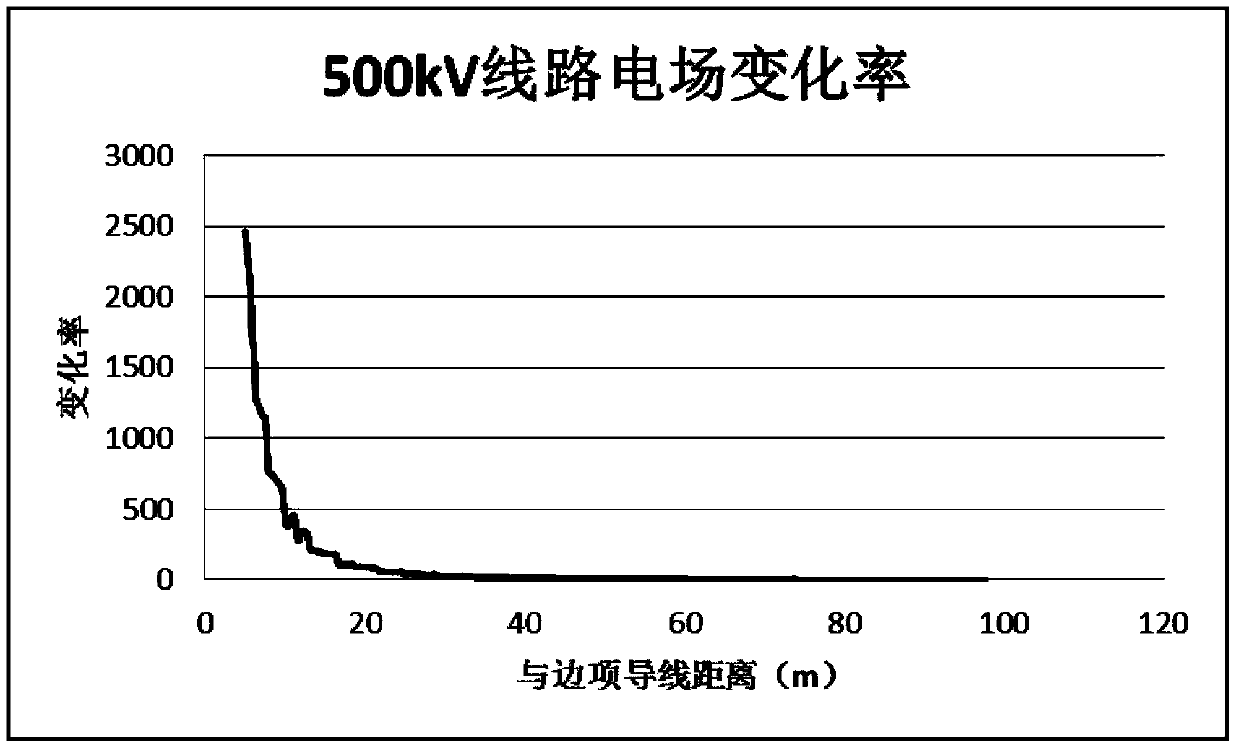
[0086] The electric field differential obstacle avoidance system is mounted on the UAV to detect the actual 500kV line. When the UAV is flying, the fuselage is basically parallel to the direction of the power transmission wire, which is equal to the height of the side wire. The flight route is 70 meters away from the side wire. meters slowly approach the wire until it is 20 meters away from the wire (this distance range is chosen to ensure the safety of the UAV and to verify whether the alarm signal of the electric field measurement obstacle avoidance system is received at the expected position halfway). In order to reduce the flight error, the flight conditions are selected as follows:
[0087] Weather: sunny and windless;
[0088] Patrol wire: as follows Figure 8 The wire in the middle of the straight line tower shown;
[0089] Set C500=56, l=0.22m, and conduct flight test.
[0090] In the middle of the flight, the UAV receives the alarm signal from the electric field me...
Embodiment 3
[0093] The electric field differential obstacle avoidance system is mounted on the UAV to detect the actual 750kV line. When the UAV is flying, the fuselage is basically parallel to the direction of the power transmission wire, which is equal to the height of the side wire. The flight route is 70 meters away from the side wire. meters slowly approach the wire, until it is 23 meters away from the wire (this distance range is chosen to ensure the safety of the UAV, and to verify whether the alarm signal of the electric field measurement obstacle avoidance system is received at the expected position halfway). In order to reduce the flight error, the flight conditions are selected as follows:
[0094] Weather: sunny and windless;
[0095] Patrol wire: as follows Figure 10 The wire in the middle of the straight line tower shown;
[0096] Set C750=77, l=0.22m, and conduct flight test.
[0097] In the middle of the flight, the UAV receives the alarm signal from the electric field...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com