Formation system and formation method of multi-mobile robot based on wireless sensor network
A wireless sensor and mobile robot technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve the problems of low precision, low reliability, small application range, etc., and achieve high precision and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
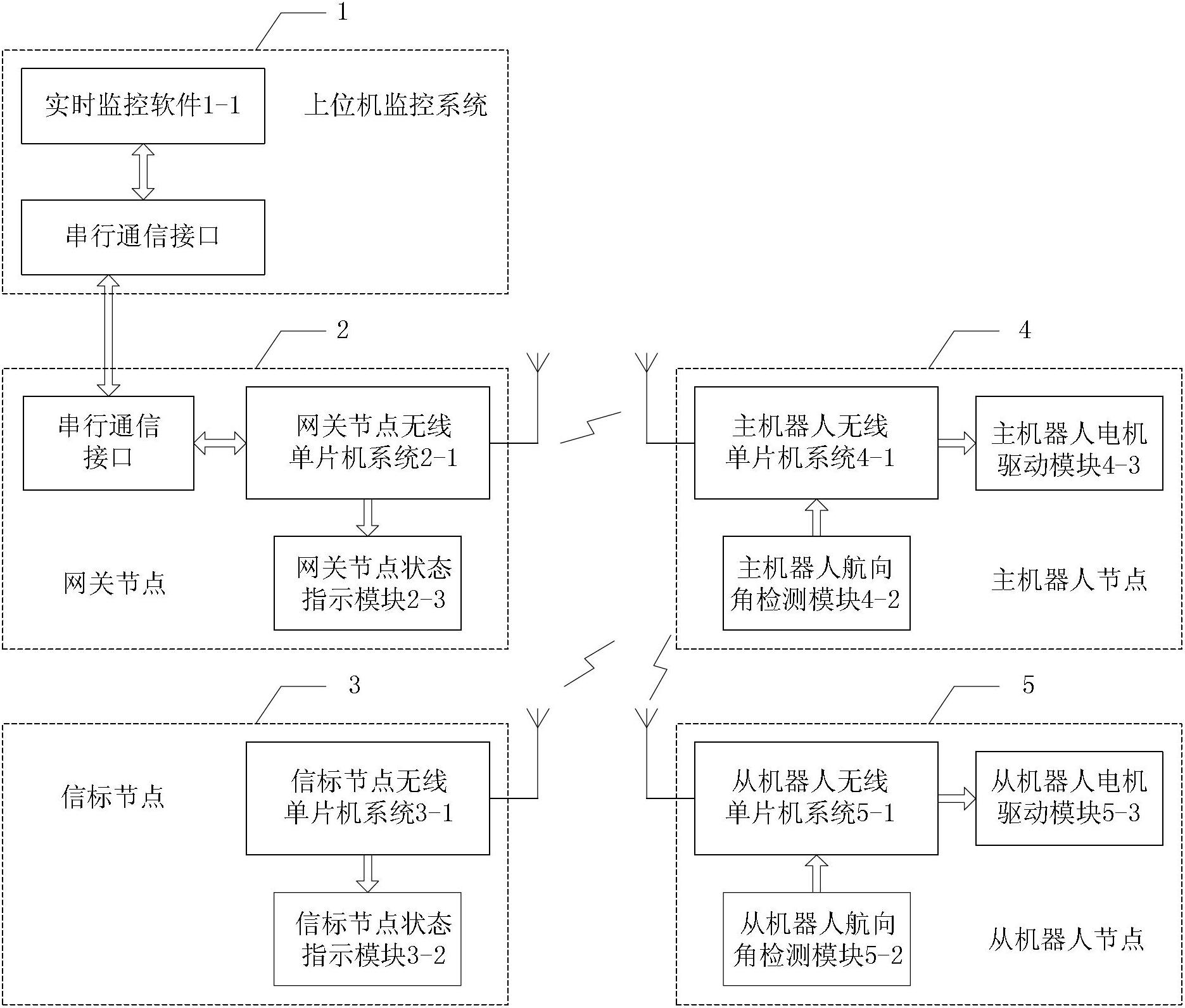
[0036] Specific implementation mode one: see figure 1 This embodiment will be described. The wireless sensor network-based multi-mobile robot formation system described in this embodiment includes a host computer monitoring system (1), a gateway node (2), m beacon nodes (3), and a master robot node (4) and k slave robot nodes (5); wherein master robot node (4) and slave robot node (5) are mobile nodes;
[0037] The gateway node (2), m beacon nodes (3), master robot node (4) and k slave robot nodes (5) jointly form a wireless sensor network through the ZigBee protocol;
[0038] The gateway node (2) is a control center for communication in the network, and is used to realize data transmission between the host computer monitoring system (1) and the main robot node (4);
[0039] The beacon node (3) is a fixed node with a known position, which is used to broadcast its own coordinate position information;
[0040] Each mobile node can establish wireless communication connections ...
specific Embodiment approach 2
[0050] Specific embodiment two: This embodiment is a further limitation to the multi-mobile robot formation system based on wireless sensor network described in specific embodiment one. In this embodiment, the host computer monitoring system (1) is embedded with real-time monitoring software ( 1-1), the real-time monitoring software (1-1) is used to monitor the state of the wireless sensor network, and the host computer monitoring system (1) realizes serial communication with the gateway node (2) through a serial communication interface .
specific Embodiment approach 3
[0051] Specific embodiment three: This embodiment is a further limitation to the multi-mobile robot formation system based on the wireless sensor network described in specific embodiment one. In this embodiment, the gateway node (2) includes a gateway node wireless single-chip microcomputer system (2- 1) and a gateway node status indication module (2-3), the gateway node wireless single-chip microcomputer system (2-1) has a wireless radio frequency communication function, and the gateway node wireless single-chip microcomputer system (2-1) sends status display data to the gateway node status indication A module (2-3), the gateway node status indicating module (2-3) is used for displaying the received status display data.
[0052] The status display data described in this embodiment includes the working status of the nodes in the network and the location information of the corresponding nodes. The working status includes normal and fault status, so as to realize timely sending o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com