


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for controlling vehicle bottom safety inspection control system
A technology of safety inspection and control system, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of long response time of under-vehicle lighting equipment, poor ability of imaging equipment to adapt to the environment, poor comprehensive management, etc. The inspection efficiency is high, the retrieval and recourse are convenient, and the effect of eliminating the occurrence of missed inspections
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0036] A control method for a vehicle bottom safety inspection control system, comprising the following steps:
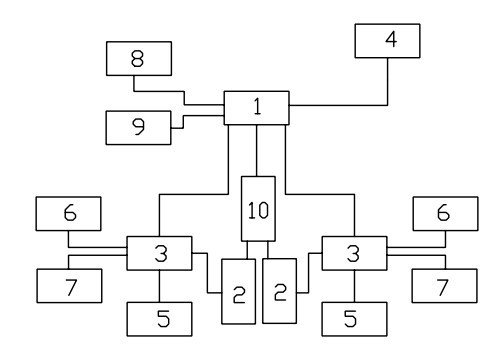
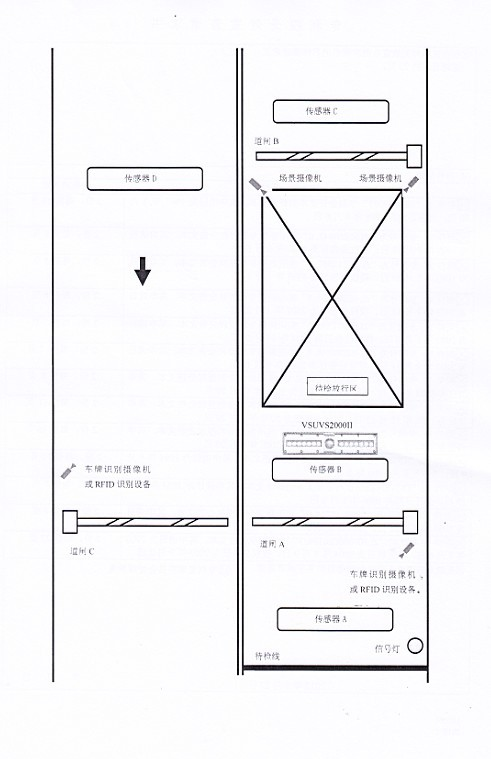
[0037] Step 1, the sensor 5 sends the information that the vehicle enters the detection range to the controller 3, and the controller sends the information to the system host 1 after receiving the information, and the system host 1 sends the start signal to the scanning imaging device 2, and the scanning imaging device 2 will The scanned vehicle chassis information is sent back to the system host 1, and the vehicle chassis information is displayed through the display 4 connected to the system host 1;
[0038] Or the sensor 5 sends the information that the vehicle leaves the detection range to the controller 3, and the controller 3 sends the information to the system host 1 after receiving the information, and the system host 1 sends the shutdown signal to the scanning imaging device 2;
[0039] Step 2, the controller 5 controls the state of the signal light 6, the sig...
Embodiment 2
[0046] The difference from Embodiment 1 is that in the present invention, the controller 3 is connected to the scanning imaging device 2 through a power supply cable; the signal lamp 6 and the barrier gate 7 are respectively connected to the controller 3 through wires; the controller 3 is connected to the system host 1 through an RS-422 interface cable, the scanning imaging device 2 is connected to the system host 1 through a network cable, the system host 1 is connected to the display 4 through a VGA cable, and the controller 3 is connected to the sensor through a wire 5 is connected; the scene camera 9 is connected with the system host 1 by a video cable; the sensor 5 is a ground sensor; the vehicle identification device 8 is a license plate recognizer, and the license plate recognizer is connected with the RS-422 interface cable System host 1 is connected.
[0047] When the present invention is in use, the ground sensing sensor sends the information that the vehicle enters ...
Embodiment 3
[0049] The difference from Embodiment 1 and Embodiment 2 is that in the present invention, the controller 3 is connected to the scanning imaging device 2 through a power supply cable; the signal lamp 6 and the gate 7 are respectively connected to the controller 3 through wires; The controller 3 is wirelessly connected to the system host 1 through WIFI, the scanning imaging device 2 is wirelessly connected to the system host 1 through WIFI, and the controller 3 is connected to the sensor 5 through wires; the scene camera 9 is connected to the system through a video cable. The system host 1 is connected; the sensor 5 is an infrared sensor; the vehicle identification device 8 is a license plate recognizer, and the license plate recognizer is connected to the system host 1 through a network cable.
[0050] When the present invention is in use, the infrared sensor sends the information that the vehicle enters the detection range to the controller 3, and the controller 3 transmits th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com