Task collaborative visual navigation method of two unmanned aerial vehicles
A navigation method and unmanned aerial vehicle technology, applied in navigation, surveying and mapping and navigation, measuring devices, etc., can solve the problems of high energy consumption, many visual sensing devices, bottlenecks in the guidance and control of unmanned aerial vehicles, etc., and achieve matching Good and reliable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The embodiments of the present invention will be described in detail below. Examples of the embodiments are shown in the accompanying drawings, wherein the same or similar reference numerals indicate the same or similar elements or elements with the same or similar functions. The embodiments described below with reference to the drawings are exemplary, and are only used to explain the present invention, but should not be understood as limiting the present invention. On the contrary, the embodiments of the present invention include all changes, modifications and equivalents falling within the scope of the spirit and connotation of the appended claims.
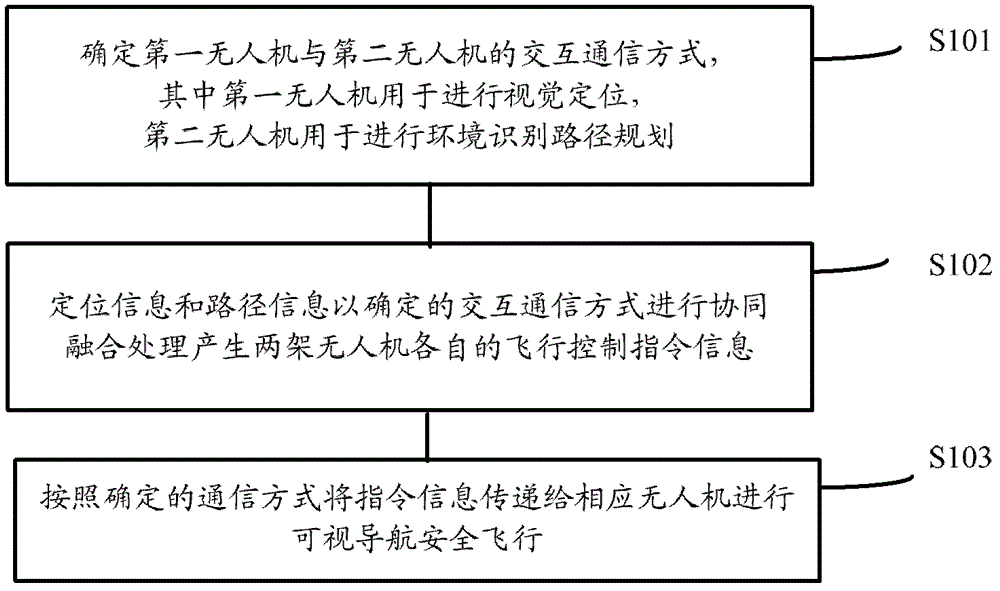
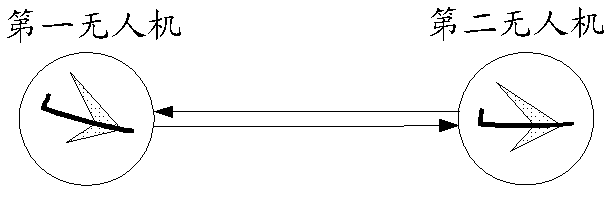
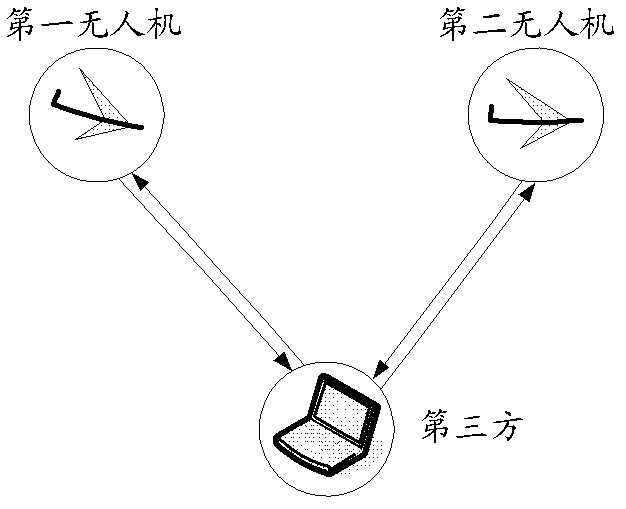
[0023] The following describes a method for cooperative visual navigation of two UAV missions according to embodiments of the present invention with reference to the accompanying drawings.
[0024] figure 1 It is a flowchart of a method for cooperative visual navigation of two UAV missions according to an embodiment of the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com