Movement control method of glass-cleaning robot and control system thereof
A technology of a glass-wiping robot and a control method, which is applied in the field of intelligent robots and can solve problems such as high labor intensity, heavy workload, and repeated wiping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
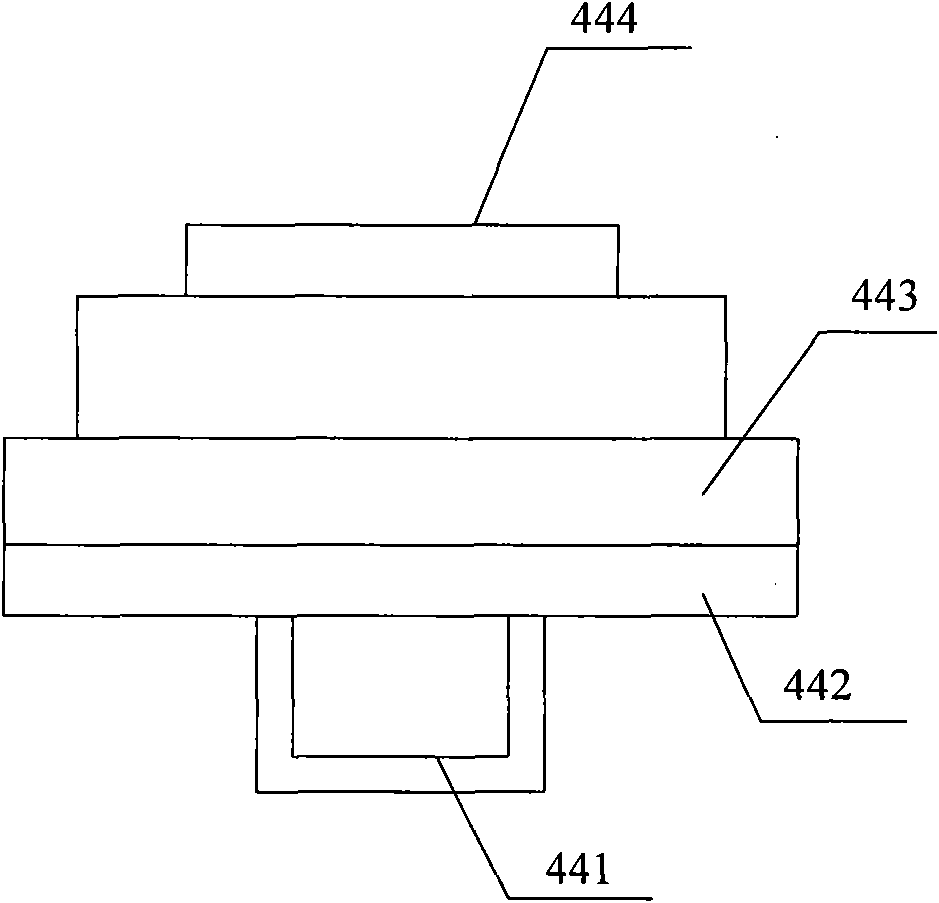
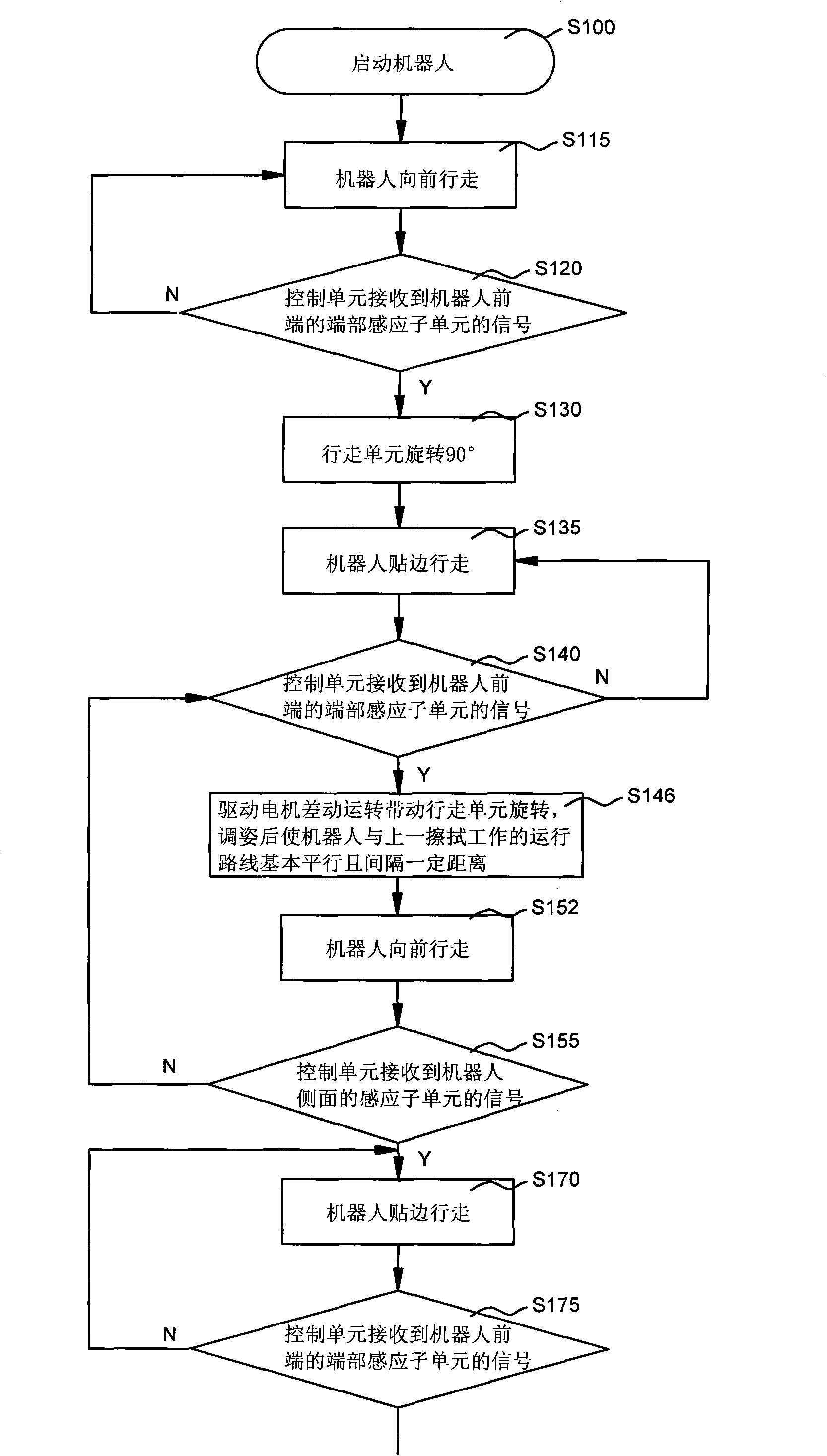
[0101] The glass-wiping robot of the present invention is a single robot. Figure 4 It is a schematic diagram of the control flow in the mobile control system of the glass-wiping robot of the present invention. Figure 5 It is a structural schematic diagram of the glass-wiping robot of the present invention. Such as Figure 4 As shown, the movement control system of the glass-wiping robot 1 of the present invention includes a walking unit 15, an energy unit (not shown in the figure), a driving unit 16, a control unit 11 and a wiping unit (not shown in the figure). Such as figure 2 and image 3 Shown, this robot 1 comprises robot shell 111, and energy unit (not shown in the figure), driving unit 16, control unit 11 are positioned at the inside of robot shell, and walking unit 15 and wiping unit are positioned at the bottom of robot shell respectively, and this wiping unit can It is a dish brush, a scraper or a fiber cloth, etc. The energy unit is a rechargeable battery, s...
Embodiment 2
[0108] The difference from Embodiment 1 is that the window cleaning robot of the present invention is split. Image 6 Shown is a schematic diagram of the control flow in the mobile control system of the glass-wiping robot in this embodiment. Figure 7 Shown is a schematic structural diagram of the glass-wiping robot of this embodiment. combine Image 6 with Figure 7As shown, the posture adjustment control system of the window cleaning robot of the present invention is composed of a driving machine 2 and a follower machine 3, both of which are independent parts. The driving machine 2 includes a driving machine housing 213, a driving unit 216, an energy unit (not shown) and a control unit 211 are respectively arranged in the driving machine housing 213, and the traveling unit 215 is located on the left and right sides of the driving machine 1. The follower 3 includes a follower housing 311, and the bottom of the housing 311 is provided with a wiping unit (not shown in the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com