Collaborative interaction method for unmanned plane cluster and visual navigation system of unmanned plane
An interactive method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicle communication, can solve the problems of lack of geographic information flight environment, large resource consumption, information lag, etc., and achieve the goal of improving information processing efficiency, high communication quality, and good communication performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
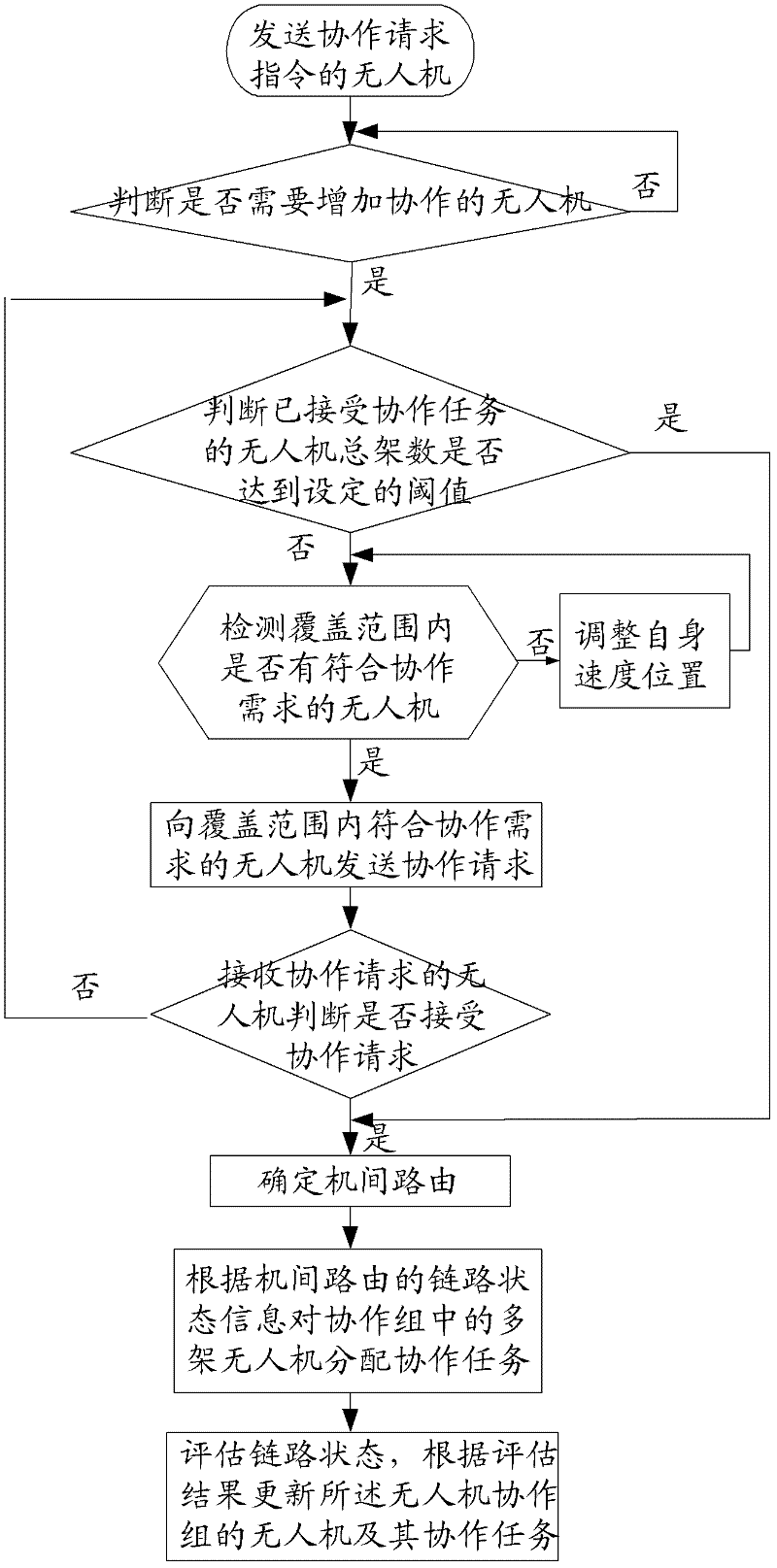
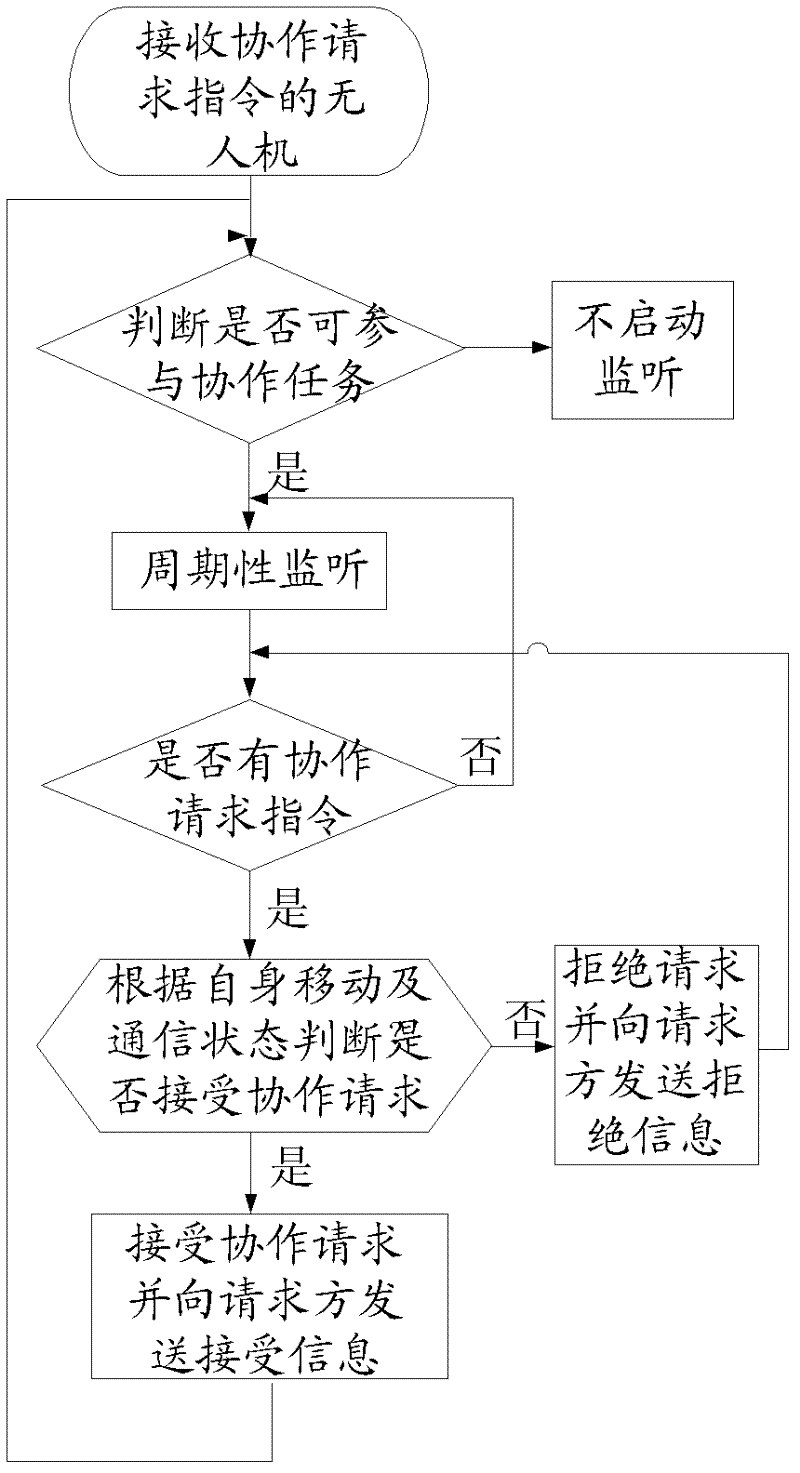
[0028] Combine below Figure 1-Figure 6 The cooperative interaction method of the UAV cluster in the embodiment of the present invention is described in detail.
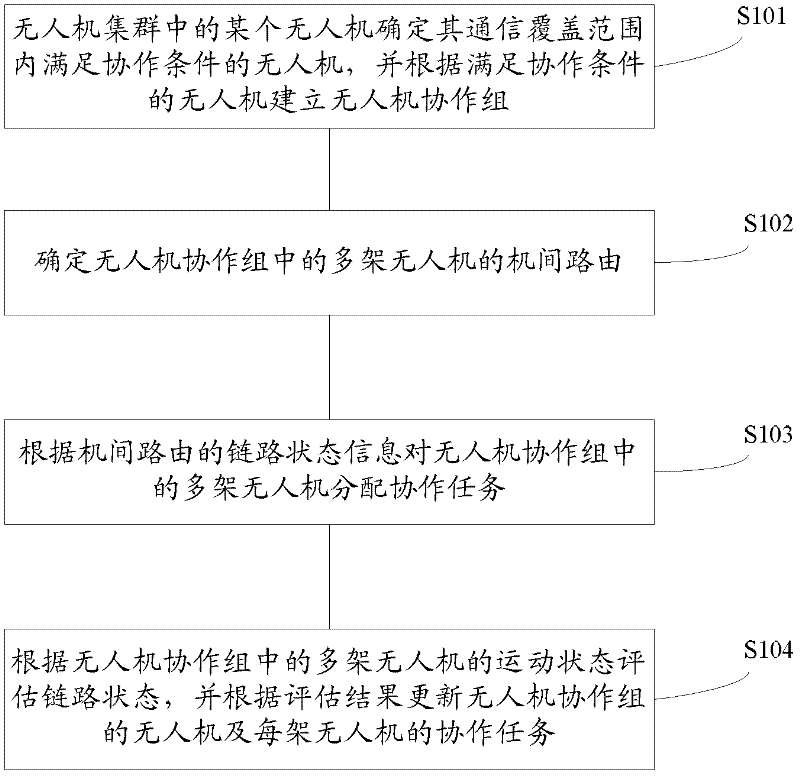
[0029] Such as figure 1 As shown, the cooperative interaction method of the UAV cluster according to the embodiment of the present invention includes the following steps:
[0030] Step S101 , a certain UAV in the UAV cluster determines the UAVs within its communication coverage that meet the cooperation conditions, and establishes a UAV cooperation group based on the UAVs tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com