ARM (advanced RISC (reduced instruction set computer) machines) and FPGA (field-programmable gate array) based navigation and flight control system for unmanned helicopter
A flight control system, unmanned helicopter technology, applied in radio wave measurement system, satellite radio beacon positioning system, attitude control, etc. , lack of application software support, etc., to achieve the effect of rich functions, reduced power consumption and volume, and strong scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
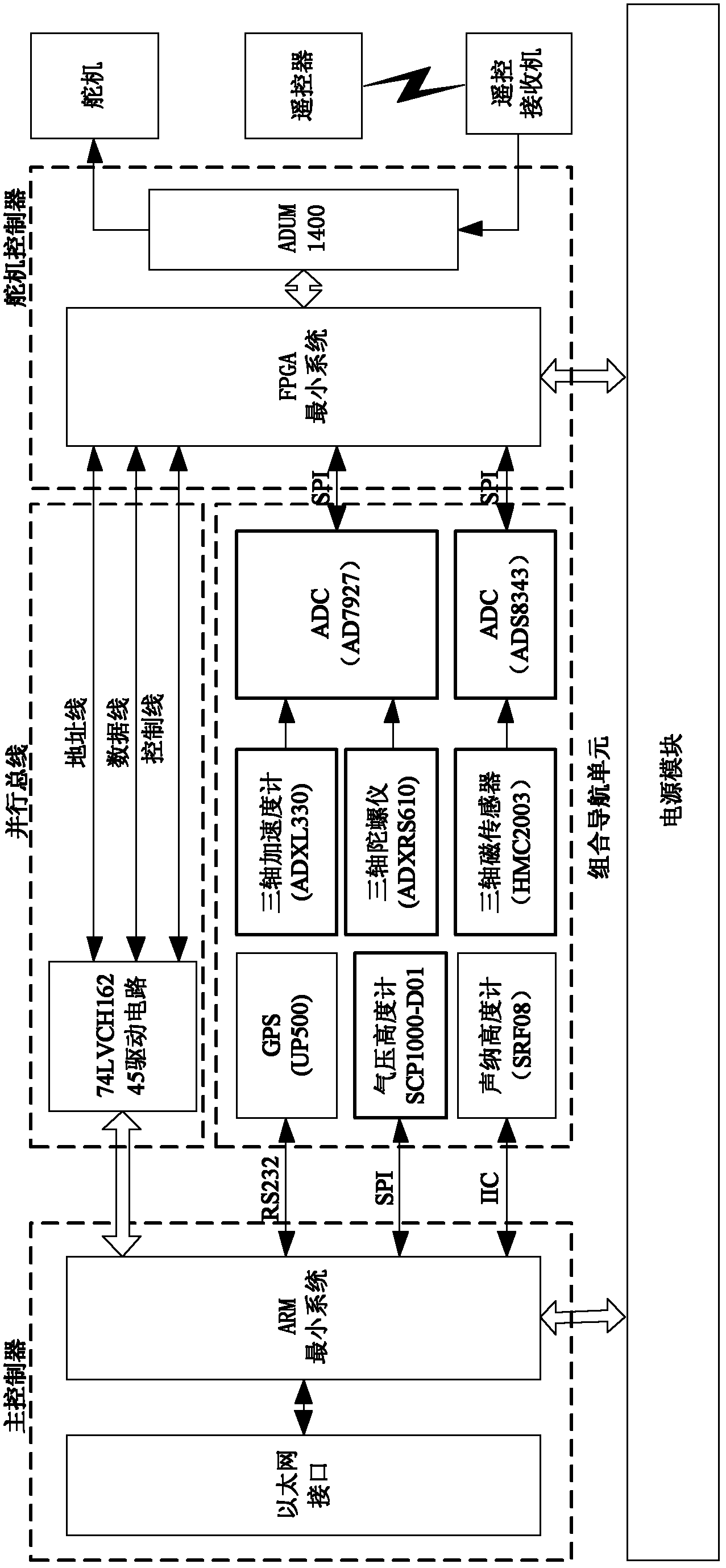
[0021] Such as figure 1 As shown, the structure of an unmanned helicopter navigation and flight control system based on ARM and FPGA of the present invention includes a PC, an integrated navigation subsystem, a power supply module and a controller. The integrated navigation subsystem is composed of sensor groups. The sensor set includes GPS, gyroscope, accelerometer, magnetoresistive sensor, barometric altimeter and sonar altimeter. Described controller comprises main controller and steering gear controller, adopts the hardware architecture scheme of ARM and FPGA, selects ARM microprocessor as main controller, selects FPGA as steering gear controller, and described main controller adopts ARM microprocessor The controller is used to run the integrated navigation algorithm and the flight control PID algorithm, and simultaneously completes the data collection of the GPS, barometric altimeter and sonar altimeter. The master controller obtains the data of the GPS through the seri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com