


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Identification method for triangular star atlas based on characteristic of inertia ratio
A triangular and inertia ratio technology, applied in the field of star map recognition, can solve the problems of increased storage space, rapid decline in recognition rate, and increased information volume, achieving the effects of reduced storage space, strong anti-interference ability, and guaranteed recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
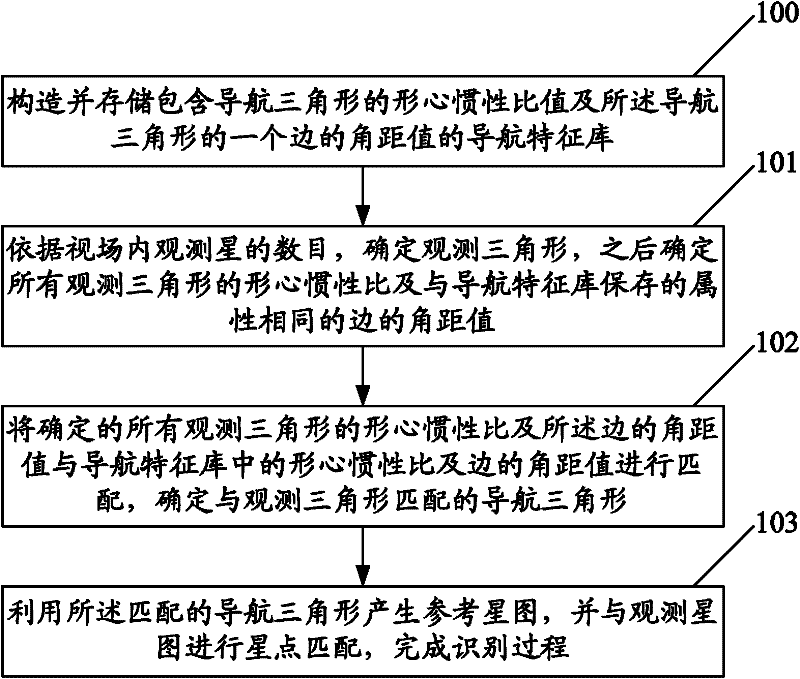
[0118] In the present embodiment, the method of the present invention has been adopted to construct and store the navigation feature library comprising the centroid-inertia ratio of the navigation triangle and the angular distance value of a side of the navigation triangle, and a navigation database has been generated; The value is 6, the value of Q is 4, the value of A is 0.002, and the value of B is 0.0004. The method for matching identification in this embodiment, such as Figure 5 shown, including the following steps:
[0119] Step 501: After the star is observed, judge whether the number of observed stars in the field of view is greater than 6, if yes, execute step 502, otherwise, execute step 504;
[0120] Step 502: further judge whether all the stars in the field of view have been processed, if yes, execute step 510, otherwise, execute step 503;
[0121] Here, judging whether all the stars in the field of view have been processed means that all the stars in the field ...
Embodiment 2
[0137] In this embodiment, the Monte Carlo method is used to generate 1000 simulated star maps, and a simulation experiment is carried out through the influence of star point position noise and magnitude noise on recognition. Table 1 gives the parameters of the simulation experiment.
[0138] Table 1
[0139]
[0140]
[0141] In order to investigate the anti-interference ability of the star map recognition method provided by the present invention to the star point position noise, the star point position in the star map is now added with Gaussian noise whose mean value is 0, and the standard deviation σ varies from 0 to 2 pixels, and the recognition result Such as Image 6 shown. from Image 6 It can be seen from the figure that when the standard deviation σ of star point position noise is equal to 2 pixels, the recognition rate can reach more than 99% by adopting the method provided by the present invention. This shows that the method provided by the present inventi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com