A Kalman filter processing method in deep integrated navigation system
A Kalman filter and deep integrated navigation technology, applied in the field of navigation, can solve the problems that the integrated navigation system cannot obtain positioning accuracy, cannot quantitatively give the observability of the system state, and is not completely observable.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
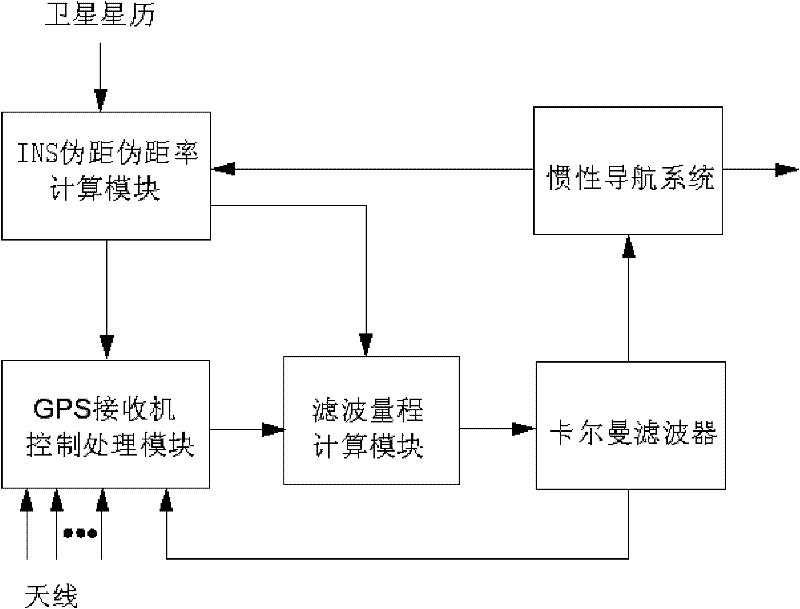
[0053] A Kalman filter processing method in a deep integrated navigation system is as follows figure 1 It is implemented on the deep integrated navigation system shown, which combines the GPS positioning system and the inertial navigation system to realize the deep integrated navigation function. The inertial navigation system transmits the speed and position information to the INS pseudo-range and pseudo-range rate calculation module, and the INS pseudo-range and pseudo-range rate calculation module uses the satellite ephemeris to calculate the satellite position at the same time, and then obtains the pseudo-range and pseudo-range rate from INS to GPS. Send the calculated pseudorange and pseudorange rate to the filter range calculation module; the GPS receiver control processing module receives the GPS signal through the antenna and sends the iner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com