Method for extracting leading line in orchard
An extraction method and navigation line technology, applied in the field of image processing, can solve the problems of time-consuming, affecting the real-time performance of the algorithm, and difficult to ensure the real-time performance requirements, and achieve the effect of fast extraction and good real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The method for extracting navigation lines between orchard forests proposed by the present invention is described in detail as follows in conjunction with the accompanying drawings and embodiments.
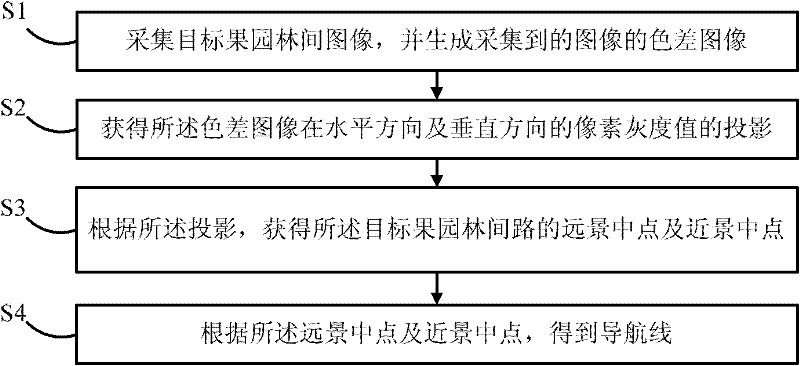
[0032] Such as figure 1 As shown, the method for extracting navigation lines between orchard forests according to an embodiment of the present invention includes steps:
[0033] S1. Collect the target orchard inter-forest image, and generate the color difference image of the collected image;
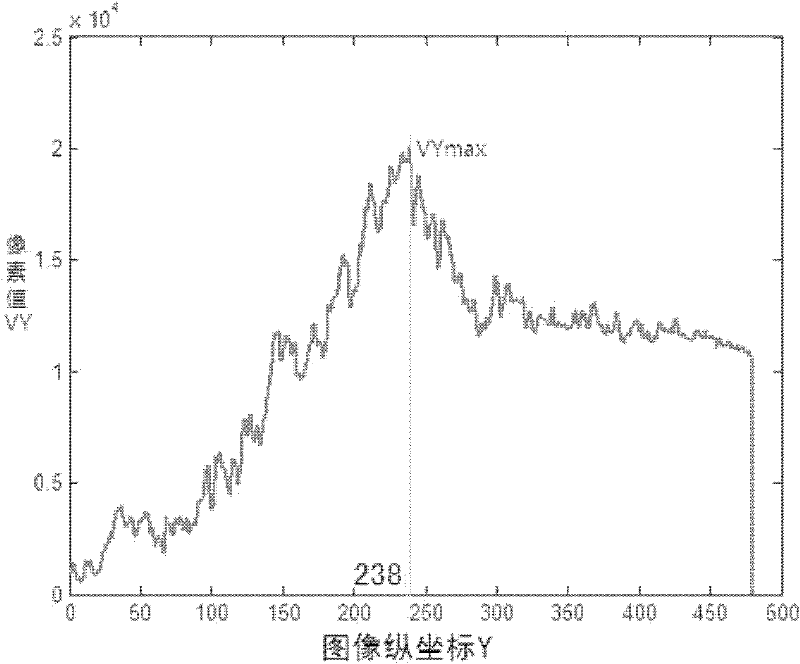
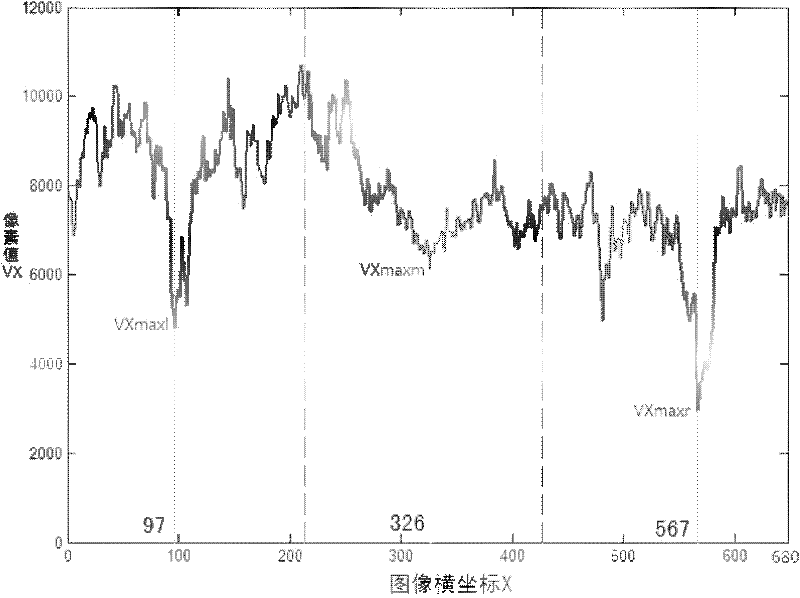
[0034] S2. Obtain the projection of the pixel gray value of the color difference image in the horizontal direction and the vertical direction;
[0035] S3. According to the projection obtained in step S2, obtain the midpoint of the distant view and the midpoint of the near view of the road in the target orchard;
[0036] S4. Obtain the navigation line according to the midpoint of the distant view and the midpoint of the near view.
[0037] In the present invention, generally, the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com