Integrated attitude determination method based on ant colony unscented particle filter algorithm
A particle filter algorithm, particle technology, applied in attitude control and other directions, can solve non-Gaussian, system nonlinear noise and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
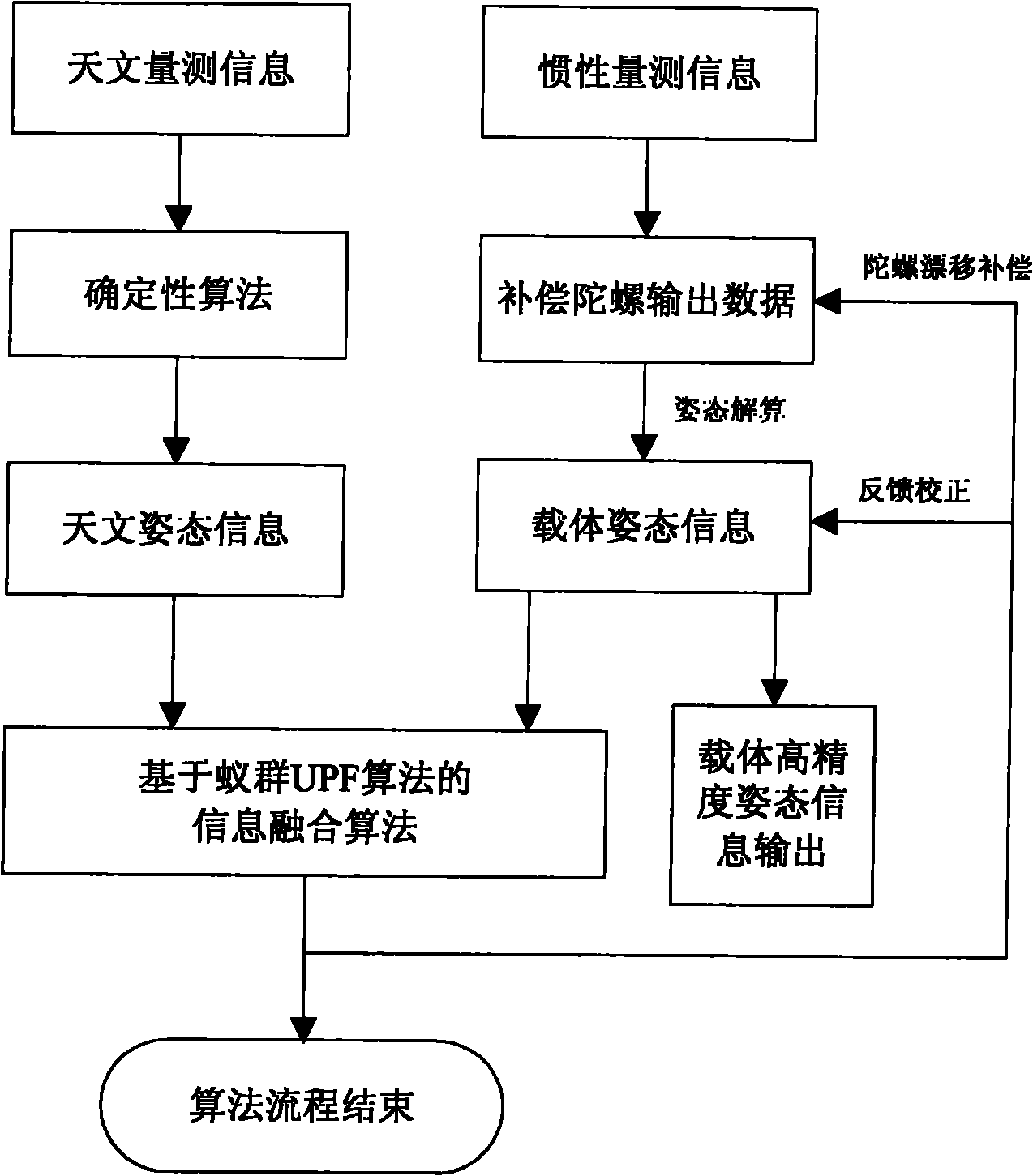
[0056] Such as figure 1 Shown, the specific implementation steps of the present invention are as follows:
[0057] 1. First, after compensating the inertial measurement information and outputting data from the gyroscope, the attitude information of the carrier is obtained through attitude calculation. The process is as follows:
[0058] a. Set the initial pose as Calculate the initial attitude quaternion array q(0):
[0059]
[0060] in, θ 0 , gamma 0 They are the pitch angle, roll angle and yaw angle respectively, q(0) is the attitude quaternion at 0 time, cos[ ], sin[ ] are cosine and sine respectively;
[0061] b. The update matrix is deduced from the initial attitude quaternion array q(0) given in a:
[0062] q ( n + 1 ) = { cos Δφ 2 I + sin Δφ 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com