Method and device for positioning particles of mobile robot
A technology of mobile robots and positioning methods, applied in positioning, measuring devices, instruments, etc., to achieve the effects of reducing complexity, improving computing speed and accuracy, and preventing degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation of the particle positioning method and device for the mobile robot provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
[0024] First, a specific implementation of the particle positioning method for the mobile robot of the present invention is given.
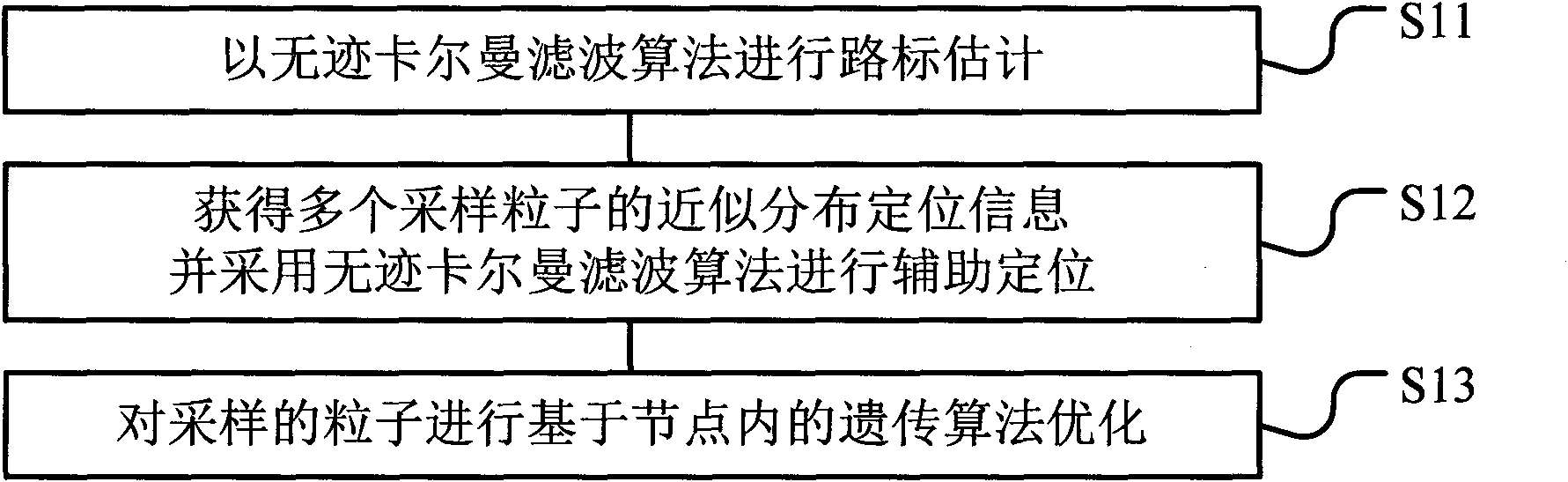
[0025] attached figure 1 Shown is a schematic diagram of the implementation steps of a specific embodiment of the method of the present invention, including: step S11, performing landmark estimation with an unscented Kalman filter algorithm; step S12, obtaining approximate distribution location information of a plurality of sampled particles, and using Trace Kalman filter algorithm for auxiliary positioning; step S13, optimize the sampled particles based on the genetic algorithm within the node.
[0026] Referring to step S11, the landmark estimation is performed by an unscented Kalman filter algorithm.
[0027] In this step, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com