Remote operating system and method
An operating system and operating instruction technology, applied in the field of remote operation, can solve problems such as large operations, inaccurate deviation signals, and difficult operation of the remote operating system, achieving the effect of improved accuracy and flexible and smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
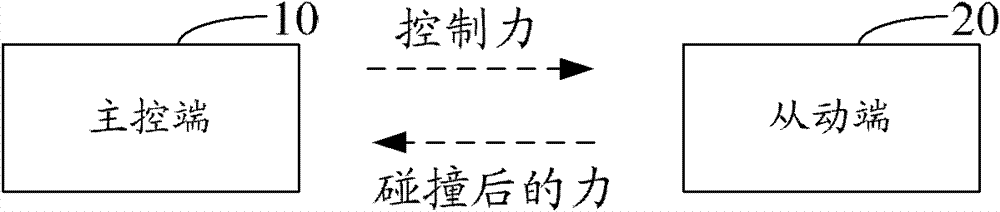
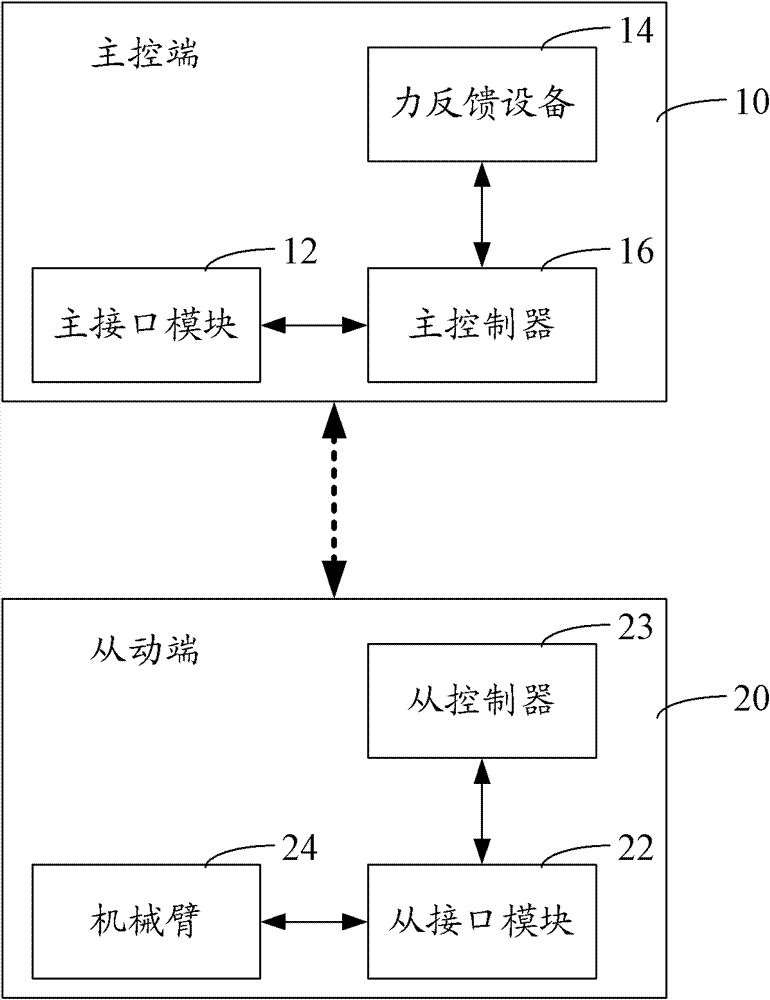
[0021] figure 1 It shows a teleoperation system in one embodiment, including a master control terminal 10 and a slave terminal 20, the master control terminal 10 is used to establish a master control terminal workspace, and obtains operation instructions; the slave terminal 20 is used to establish a slave terminal The workspace of the slave end collides with the operation object in the workspace of the slave end according to the operation instruction, and gives feedback.
[0022] The master workspace is the space for the user to operate, and the slave workspace is the space for performing operations on the operation objects according to the user's operations in the workspace. The user operates on the master control terminal 10 , inputs an operation instruction in the master control terminal 10 , and exerts a control force on the slave terminal 20 to realize precise control of the slave terminal 20 . The slave end 20 collides with the operation object in the work space of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com