Prosthetic electric smart manipulator
A dexterous hand, electric technology, applied in the direction of manipulator, program-controlled manipulator, chuck, etc., can solve the problems of small activity space, lack of flexibility, difficult to control accurately, etc., to achieve the effect of accurate movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing and example implementation
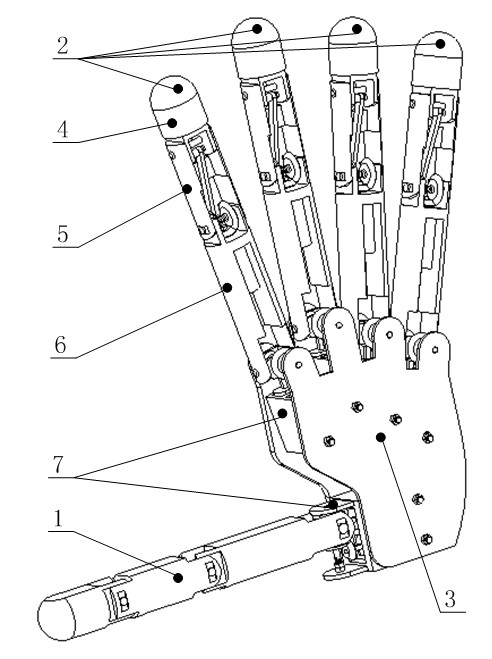
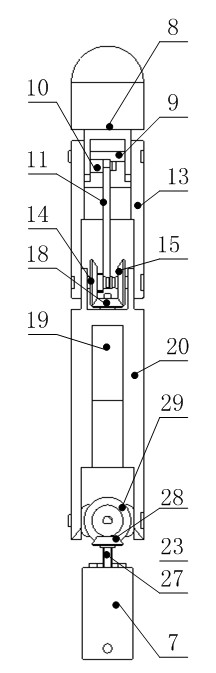
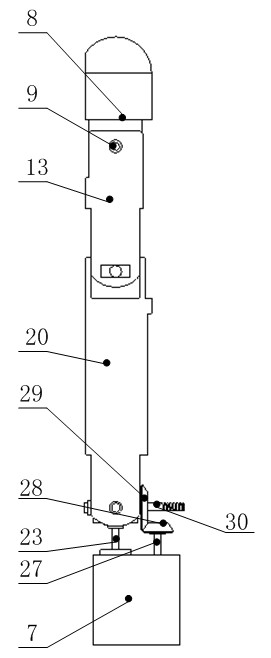
[0027] Such as figure 1 , figure 2 , image 3 , Figure 5 , Figure 7 As shown, the present invention is made up of an electric thumb 1, four electric fingers 2 and a mechanical palm 3; the electric thumb 1 and the four electric fingers 2 are all composed of an upper knuckle 4, a middle knuckle 5, a lower knuckle 6 and a base body 7 components; electric thumb 1 has four active degrees of freedom, each electric finger 2 has three active degrees of freedom and one driven degree of freedom; the anthropomorphic electromechanical dexterous hand has sixteen active degrees of freedom and four driven degrees of freedom, Consistent with the degree of freedom of the human hand.
[0028] Such as figure 1 As shown, the electric thumb 1 and four electric fingers 2 are installed in the mechanical palm 3 at a certain angle through the base body 7, and are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com