Inner controlling system for gestures of underwater robot
A technology of underwater robots and control systems, applied in attitude control, underwater operation equipment, ships, etc., can solve problems such as difficult to achieve real-time rapid stability, operation failure, roll and pitch control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] A preferred embodiment of the present invention is described in detail as follows in conjunction with accompanying drawing:
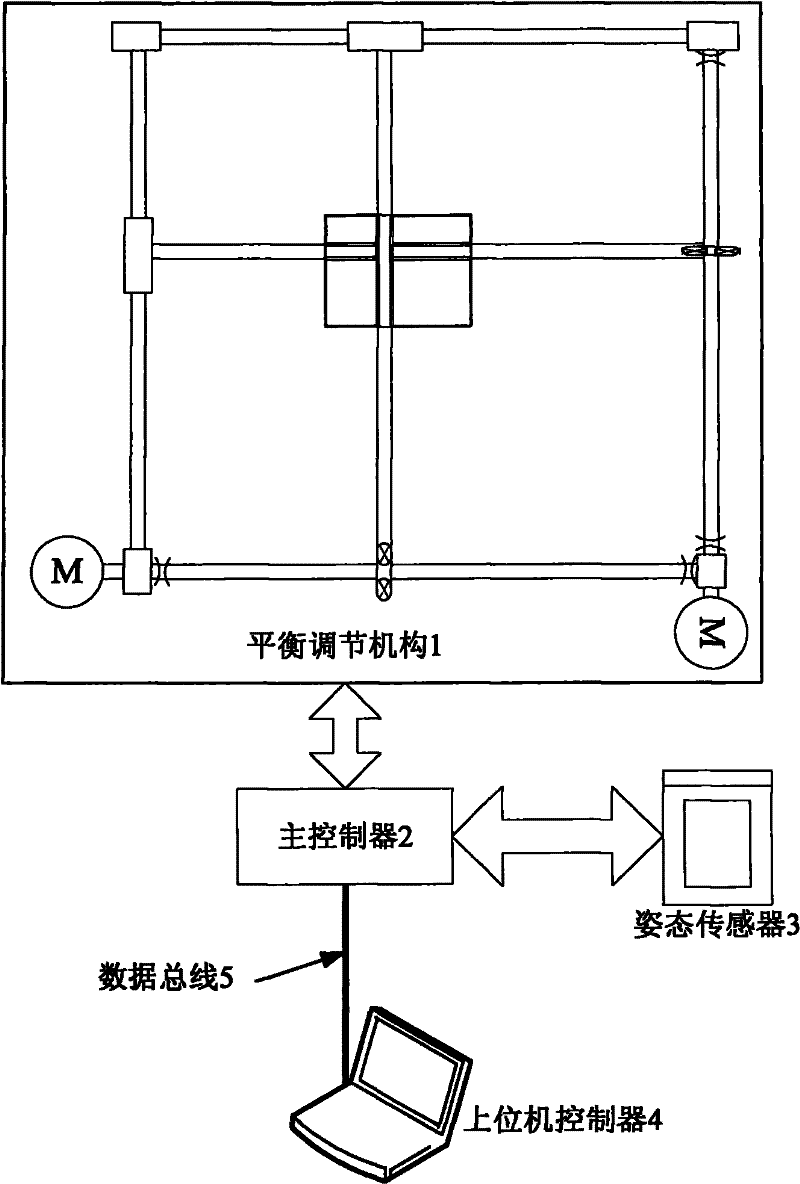
[0021] Such as figure 1 As shown, the attitude control system of the underwater robot includes: a balance adjustment mechanism 1, a main controller 2, an attitude sensor 3 and a host computer controller 4;
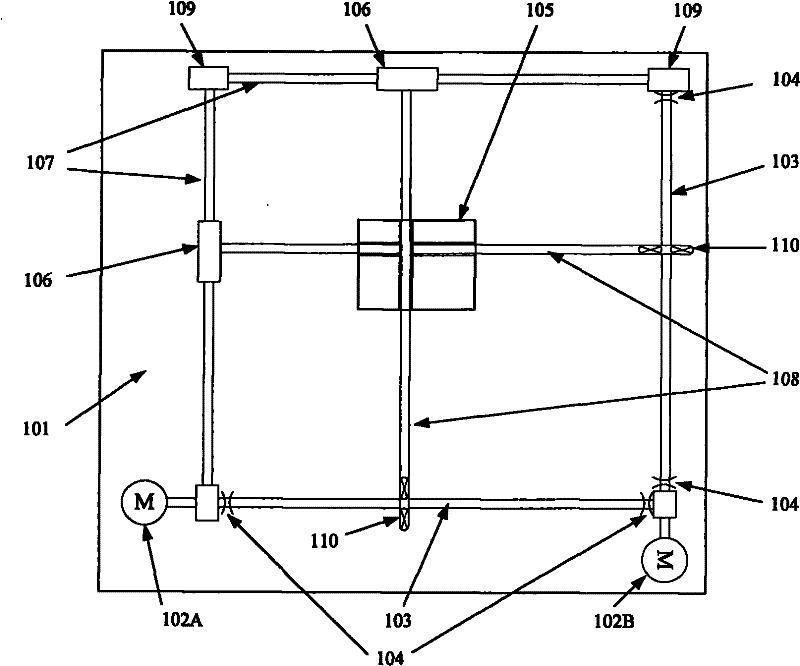
[0022] see figure 2 , the balance adjustment mechanism 1 includes a center of gravity slider 105, two drive motors 102 (comprising a horizontal drive motor 102A and a longitudinal drive motor 102B), two worms 103, two guide rails 107, two slide rods 108, four limiters A switch 104, a mechanism platform 101 and four fixing devices 109; two drive motors 102 are respectively connected with two worms 103 to drive the worms 103 to rotate; the two worms 103 are respectively driven by two worm gears 110 to drive two slide rods 108 Carry out planar movement; one end of each slide bar 108 is connected with a worm wheel 110, passes through the cente...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com