Wheel type barrier-crossing wall-climbing robot
A wall-climbing robot and robot technology, applied in the field of robotics, can solve the problems of large magnetic adsorption force of crawler-type mobile robots, etc., and achieve the effect of good obstacle surmounting ability and large adsorption force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
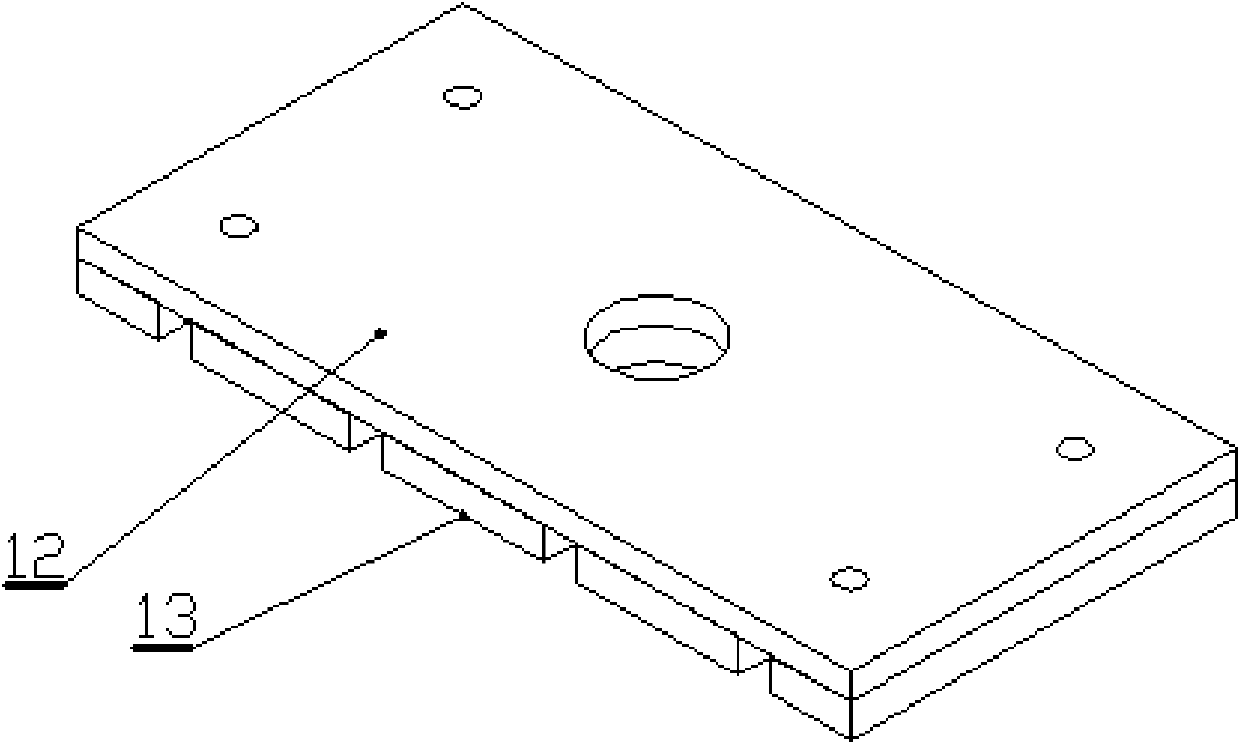
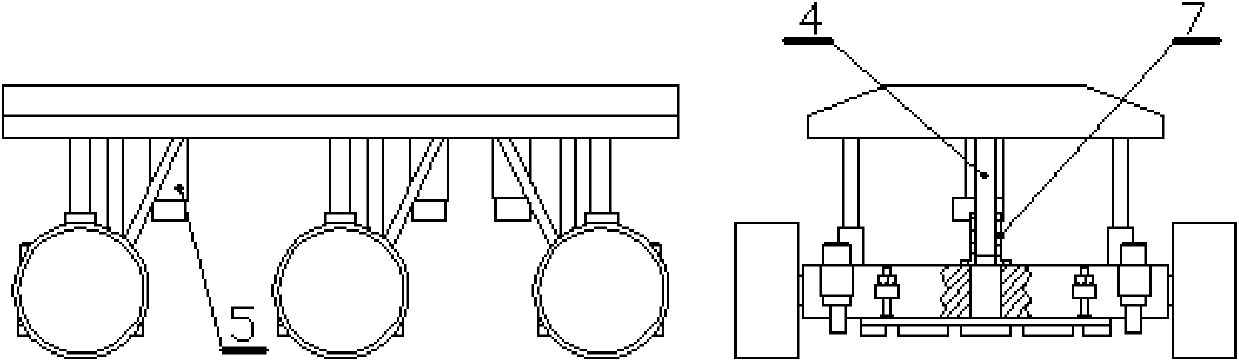
[0018] Such as figure 1 and figure 2 As shown, this embodiment includes: a robot frame 1, three sets of mobile adsorption mechanisms 2 and their corresponding linear slide rails 3, lead screws 4 and drive motors 5, wherein: three sets of linear slide rails 3 and lead screws 4 are vertical It is arranged under the robot frame 1 and its two ends are respectively connected with the robot frame 1 and the mobile adsorption mechanism 2 , and the driving motor 5 is fixedly connected with the mobile adsorption mechanism 2 .
[0019] Described mobile adsorption mechanism 2 comprises: magnet assembly 6, lead screw nut 7, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com