Reconfigurable miniature mobile robot cluster locating and tracking system
A mobile robot, positioning and tracking technology, applied in the system field of the robotics field, can solve problems such as being unsuitable for reconfigurable micro mobile robots, and achieve the effects of reducing scanning workload, reducing system cycle, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
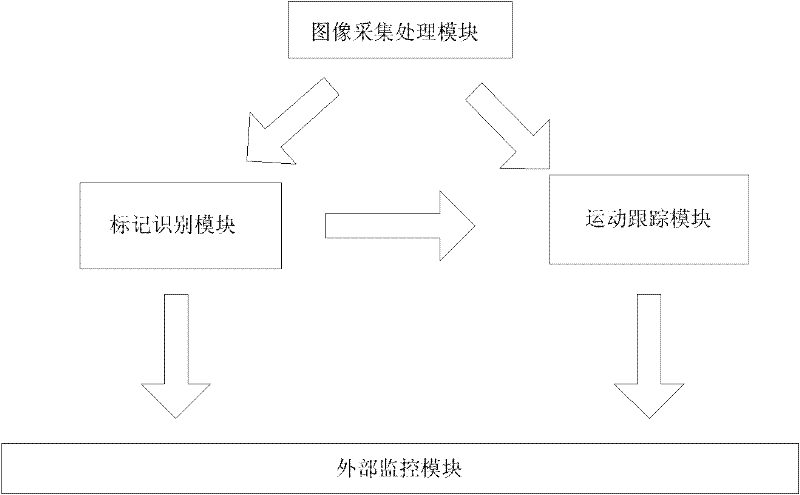
[0021] Such as figure 1 As shown, this embodiment includes: an image acquisition and processing module, a marker identification module, a motion tracking and positioning module and an external monitoring module, wherein: the image acquisition and processing module is connected with the marker identification module and the motion tracking and positioning module to transmit black and white binarized image information , the marker recognition module is connected to the motion tracking and positioning module to transmit the robot label information and the initial scanning area information of the robot, the motion tracking and positioning module is connected to the external monitoring module to transmit the speed information and position and posture information of the robot, and the marking recognition module is connected to the external monitoring module for transmission Label information of the robot.
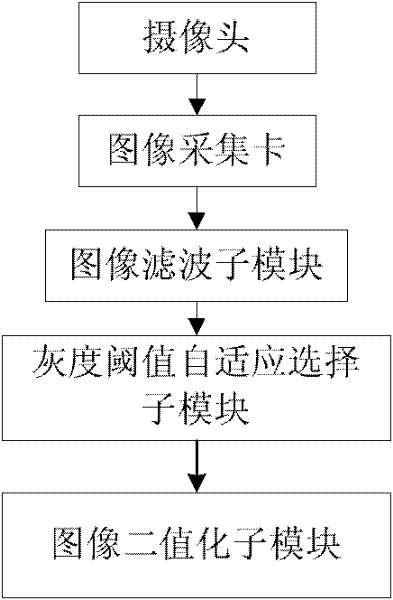
[0022] Such as figure 2 As shown, the image acquisition processing module i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com