Method for lateral control of unmanned aerial vehicle
A control method and UAV technology, applied in attitude control and other directions, can solve problems such as adverse effects and deviations of flight performance such as range and voyage time, and achieve the effect of shortening the flight path of the airline, simple structure and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with examples and accompanying drawings.
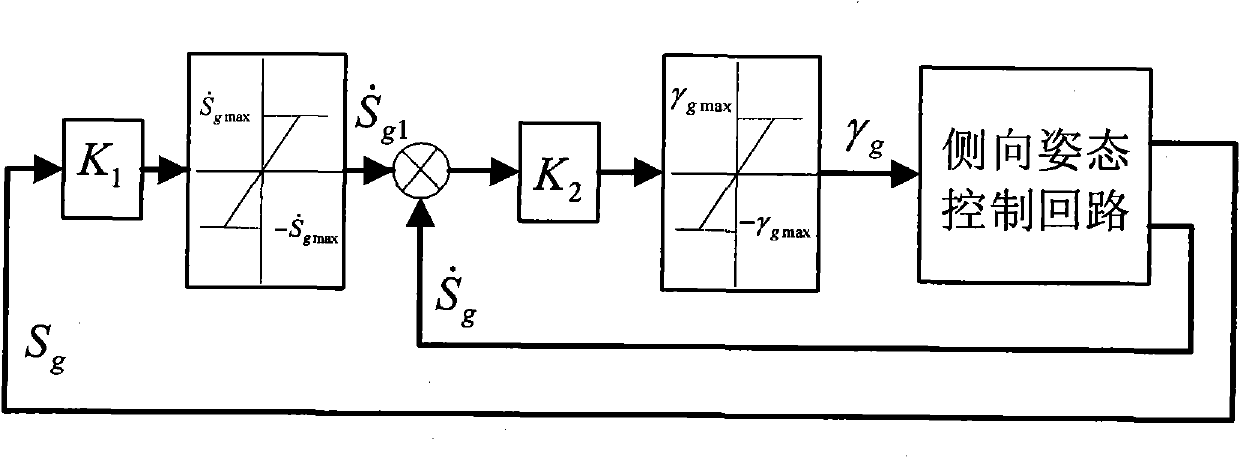
[0025] Consider the minimum ground speed V of a UAV dmin is 100m / s, the maximum roll angle allowed by the aircraft γ gmax is 30°, and the amount of turning in advance when the flight segment is switched during the flight of the aircraft is 2000m. According to the lateral mathematical model of the aircraft, according to the principle of automatic control and the corresponding design requirements, design its lateral attitude control loop, select the appropriate side offset distance feedback control coefficient K1 and side offset speed feedback control coefficient K2, so that the aircraft The stability, rapidity and steady-state accuracy of lateral movement meet the design requirements. The lateral control of the UAV is realized through the following steps.
[0026] Step 1: Set the side deviation speed limit value As the initial value, choose ξ=0.5.
[0027...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com